






作品名称水下机器人控制软件
团队成员
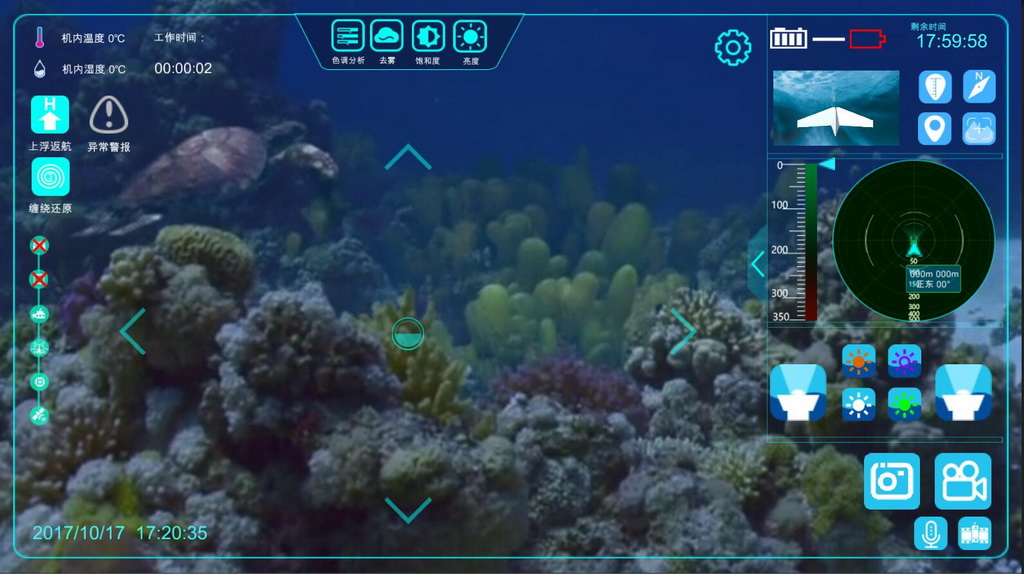
水下机器人可视化系统是水下机器人获取周围环境的重要方式,一方面它为机器人提供了水下目标的检测、跟踪和定位;另一方面它可以将获得的环境信息抽象为可供机器人规划和决策的环境模型。操作人员可通过该系统控制水下机器人的行动,以此来获取处理水下图像,了解水下世界的真面目。
以优质的可视化操作界面为基础,作品实现了:
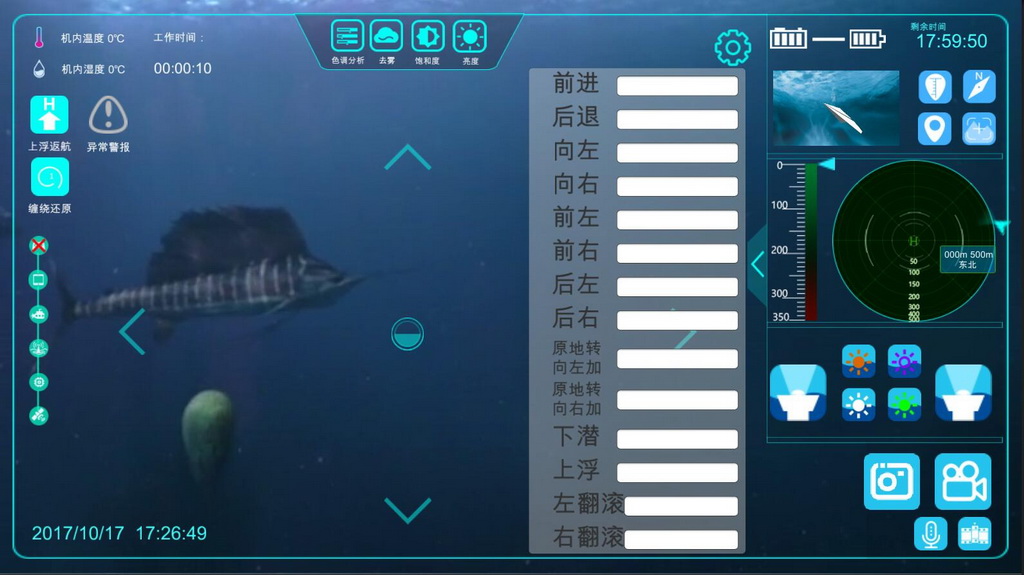
①通过手柄控制水下机器人;
②提供多平台软件控制服务;
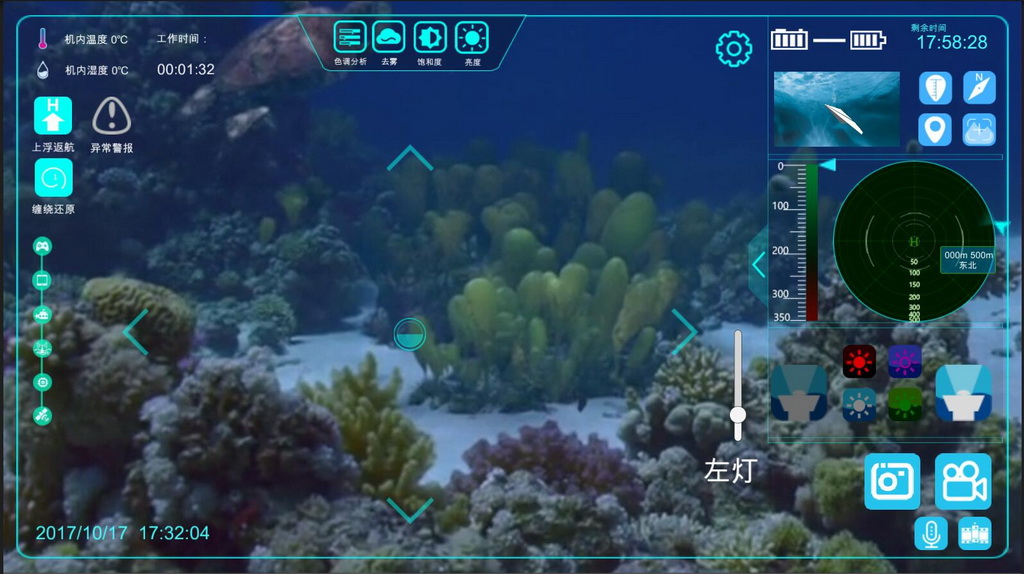
③水下机器人三维姿态显示;
④数量级的控制方法;
⑤GPS定位系统;
⑥兼容多种摄影机型号,实时播放录制视频;
⑦水下视频拍摄结果图形优化等功能。
既可服务于水下勘探部门、核电环保部门、海洋科考部门等政府部门,又可为渔民、海洋爱好者广大民众提供简便有效的水下机器人控制手段。


