作品名称基于图像处理的无接触式裂缝检测系统
参赛院校天津大学
团队成员韩睿
奖项等级一等奖
竞赛年份2021
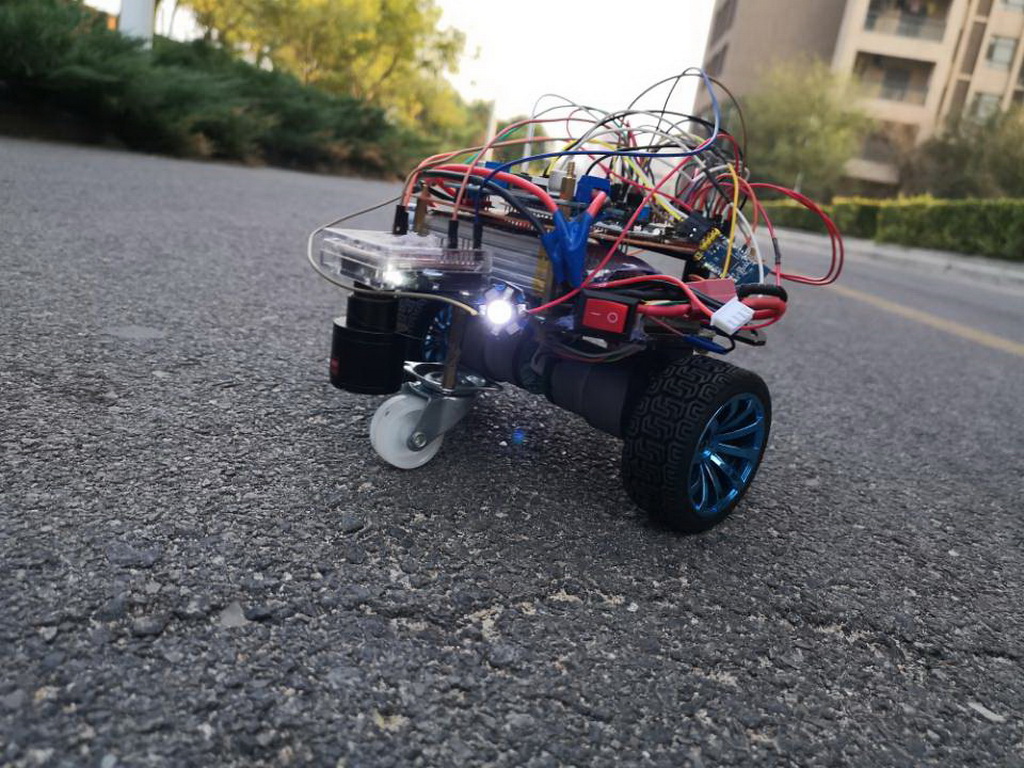
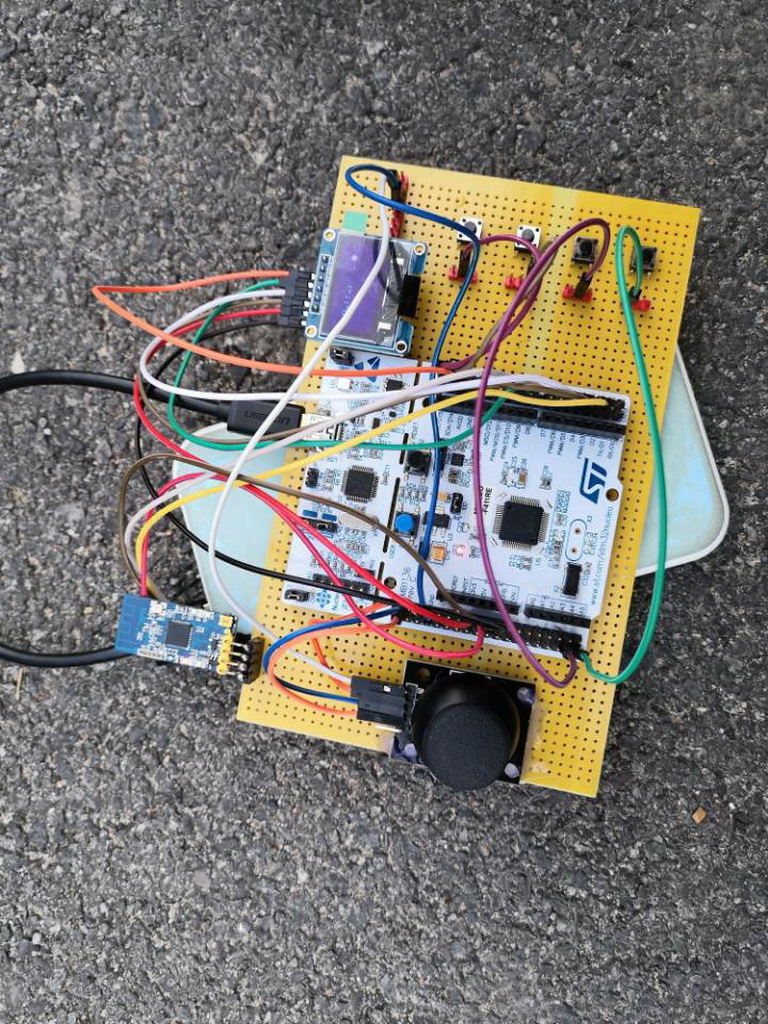
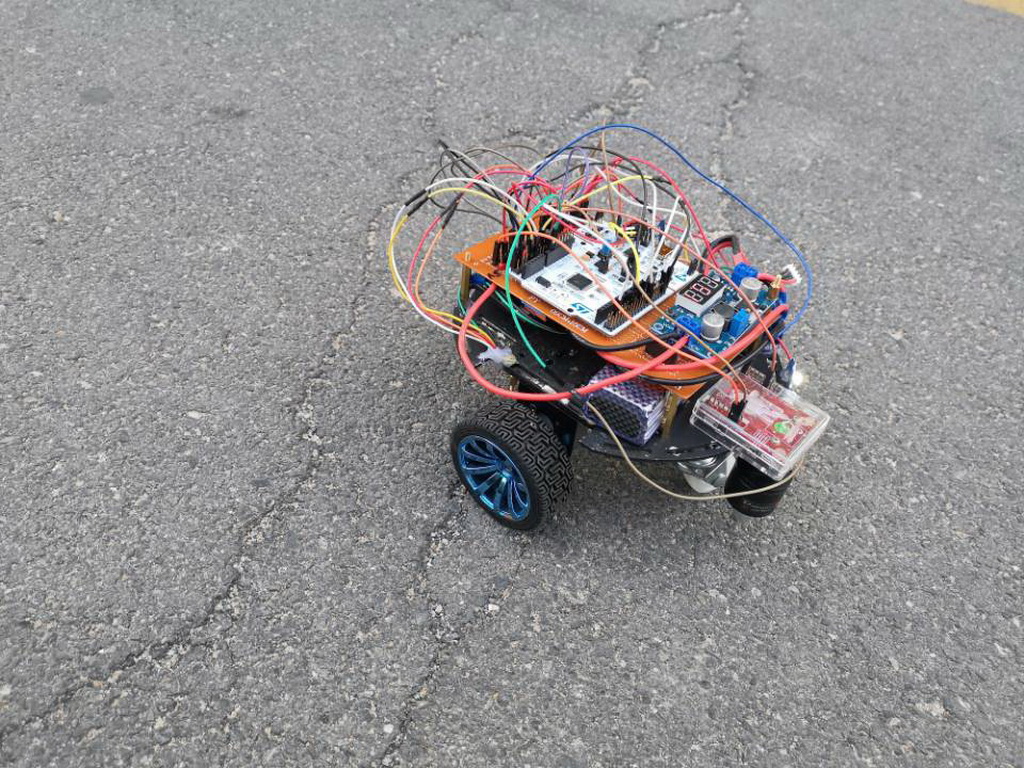
本设计是一款路面裂缝检测系统,包含路面裂缝检测机器人和人机交互操纵软件(上位机或用户接收机)两部分。带有摄像头的路面裂缝检测机器人可以自动对路面进行检测并对疑似裂缝的区域进行标记并拍照,并将图像和路面位置进行保存并调用相关图像处理算法对路面裂缝图像进行分析,包含图像增强算法,图像去噪算法,图像分割算法,将图像信息通过无线传输模块传输至上位机(或用户接收机)。上位机系统接受来自机器人的图像并使用Alexnet网络对图像进行分类,并计算裂缝的宽度以得到裂缝的损坏程度,裂缝位置,裂缝类型及等级,并给出一定的修补建议。技术工人可以通过上位机得到具体的信息,以代替路面检修工人对路面环境进行检测和标记判别。此外,该系统支持自动探索检测和人工手动操纵两种模式,路面裂缝检测机器人自身采用STM32F4系列主控芯片,机器人自身带有补光系统,可在晴天阴天黑夜等多种环境下工作完成任务,机器人采用锂电池模块供电,无需连接额外的供电导线。


