


作品名称一种基于麦克纳姆轮的巡逻报警灭火机器人
参赛院校山东科技大学
指导老师吕文红、杨照泰
团队成员申伟、王祥健、张月、秦俊帅、房兴玥
奖项等级一等奖
竞赛年份2021
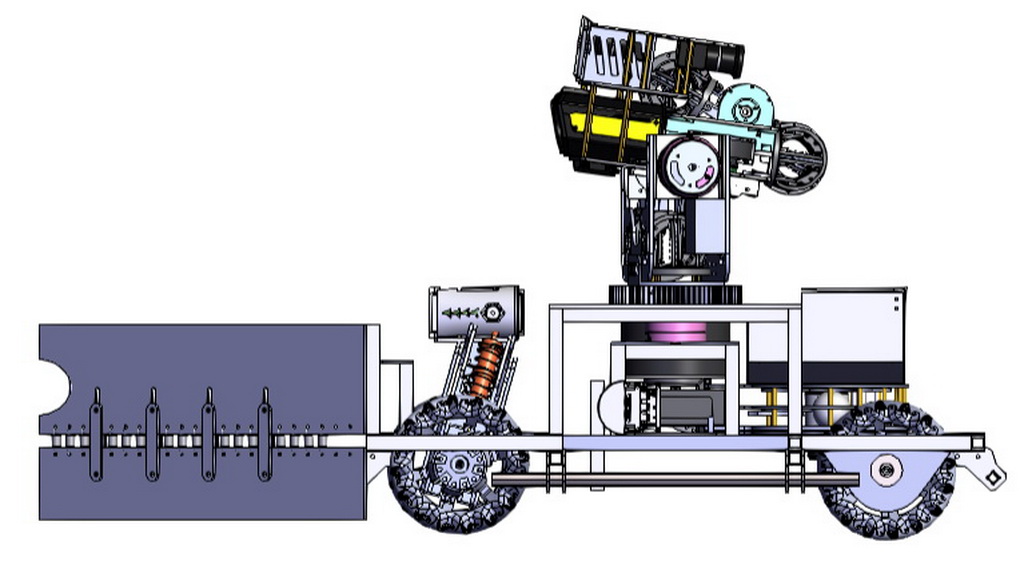
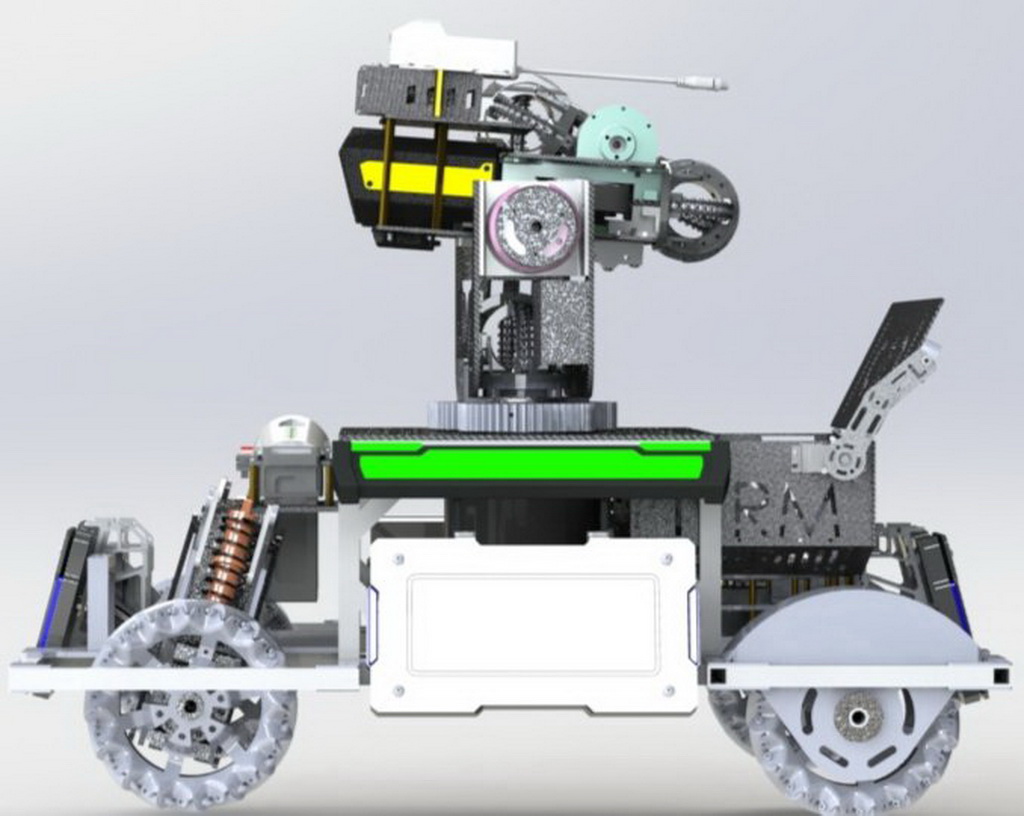
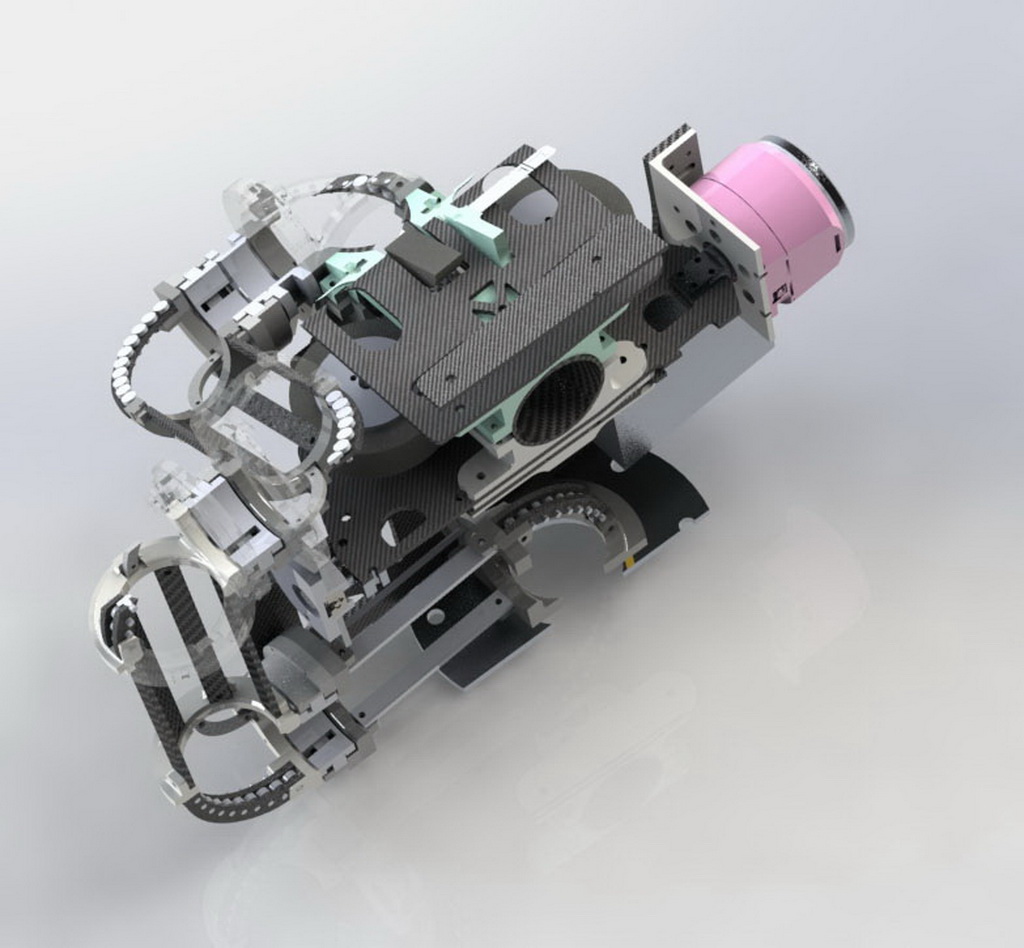
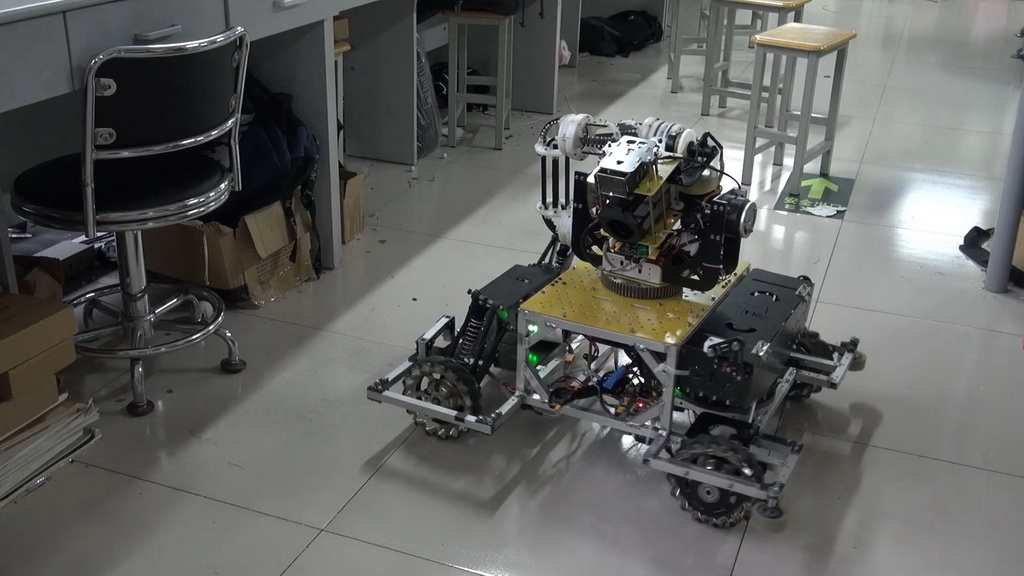
巡逻报警机器人依靠红外寻迹模块进行路径识别,利用 M3508 直流无刷减速电机推动麦克纳姆轮前行,应用红外对管探测法单片机通过反射回来的红外光去确定黑线的位置和小车的行走路线。前进的同时,机器人云台进行360°旋转,利用红外摄像仪观察四周,采用SKP 系列激光测距雷达,使用了全新的 DeTOF 技术,一旦发现火源,调整角度发射灭火弹丸并立刻向防火工作站发送警报,并用GPS定位到火源的位置。 巡逻灭火机器人具有一定的灭火、减缓火势蔓延的功能。其储弹箱内可存有近50个灭火弹丸,电机推动拨齿进行供弹,灭火弹丸再通过空间连杆发射出去。弹链应用空间连杆技术,使俯仰轴电机的控制不受其他外力的影响,从而使俯仰轴电机能够将枪管稳定地从一个俯仰角调节到另一个俯仰角,降低能耗。同时为了使弹丸不易卡死,我们在输弹通道的拐角处放小轴承,减小摩擦。在灭火弹丸的出口处使用限位胶轮,给弹丸提供初速度并控制弹丸的初始发射位置相同,从而得到稳定的弹道。云台的俯仰pitch轴依靠GM6020直流无刷电机进行控制,YAW轴采用G M6020电机加齿轮与回转支承进行齿轮配合,这样可以保证弹丸能够精确的击中火源。灭火弹丸受高温后,外壳融化,释放其内部的灭火材料,以达到其灭火阻火的目的.


