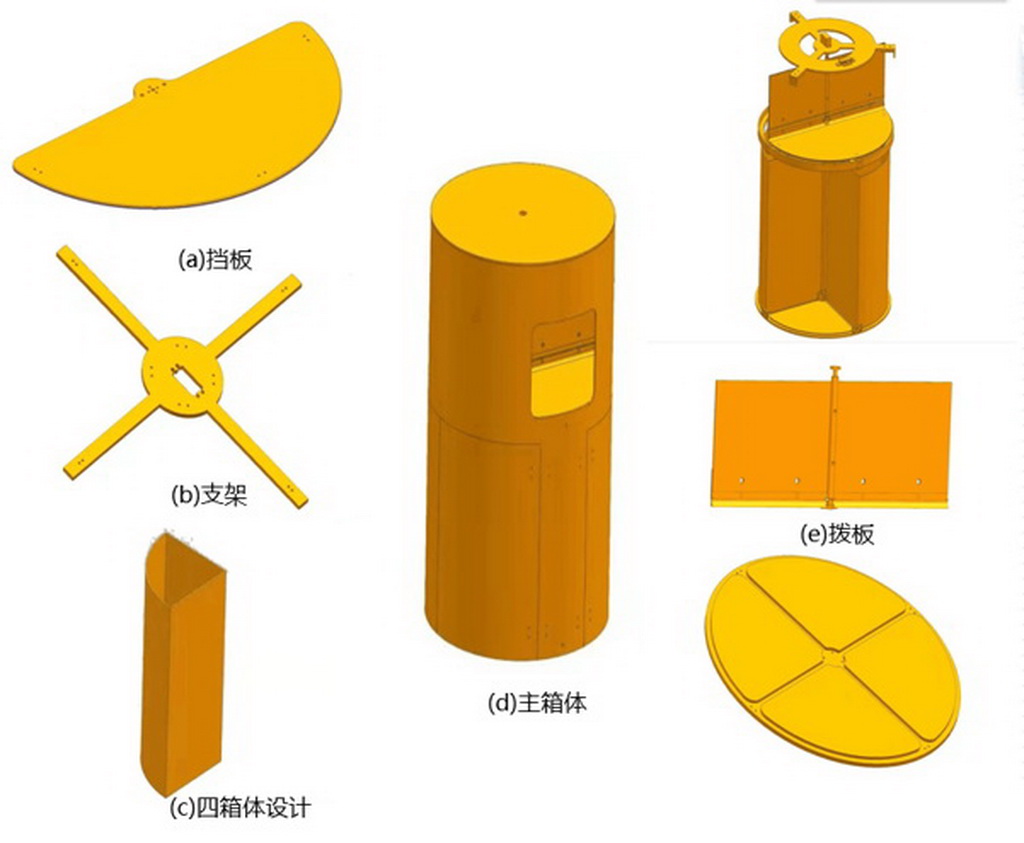
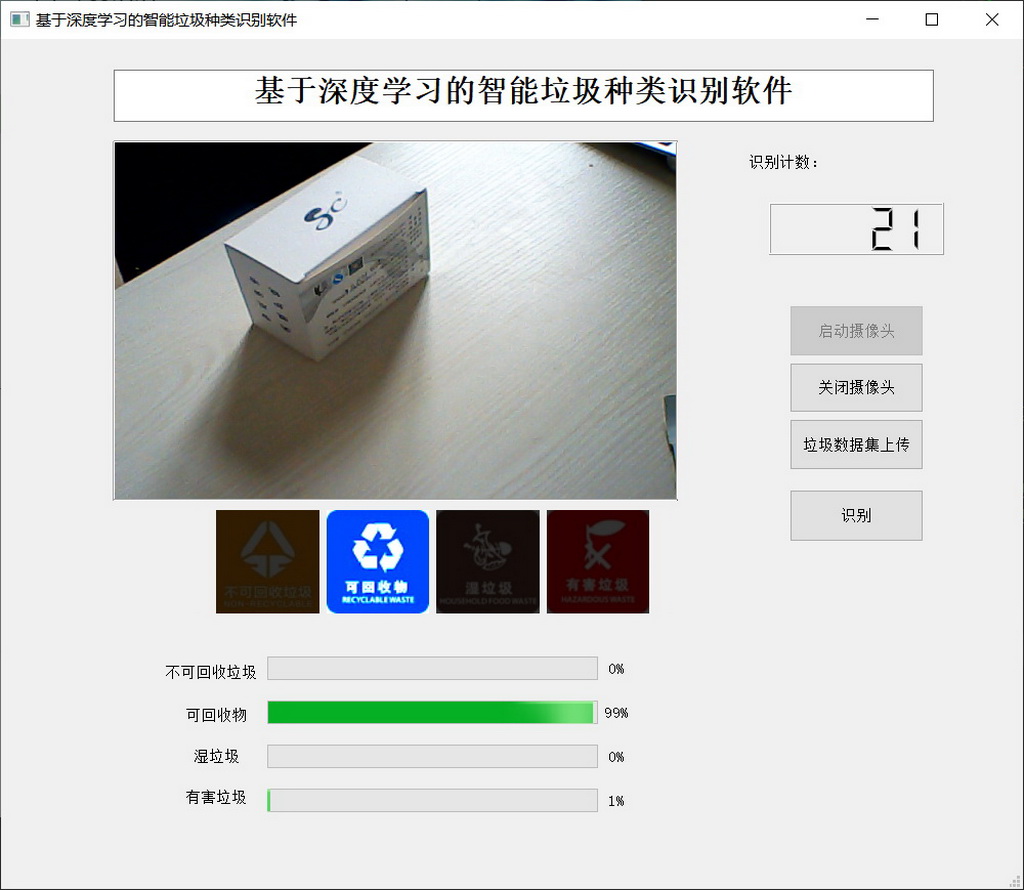
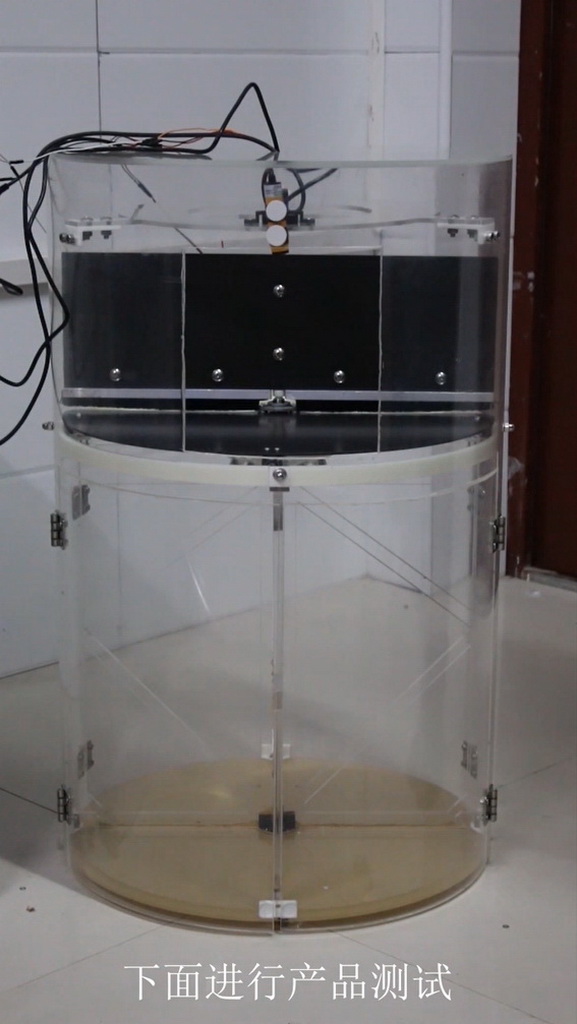
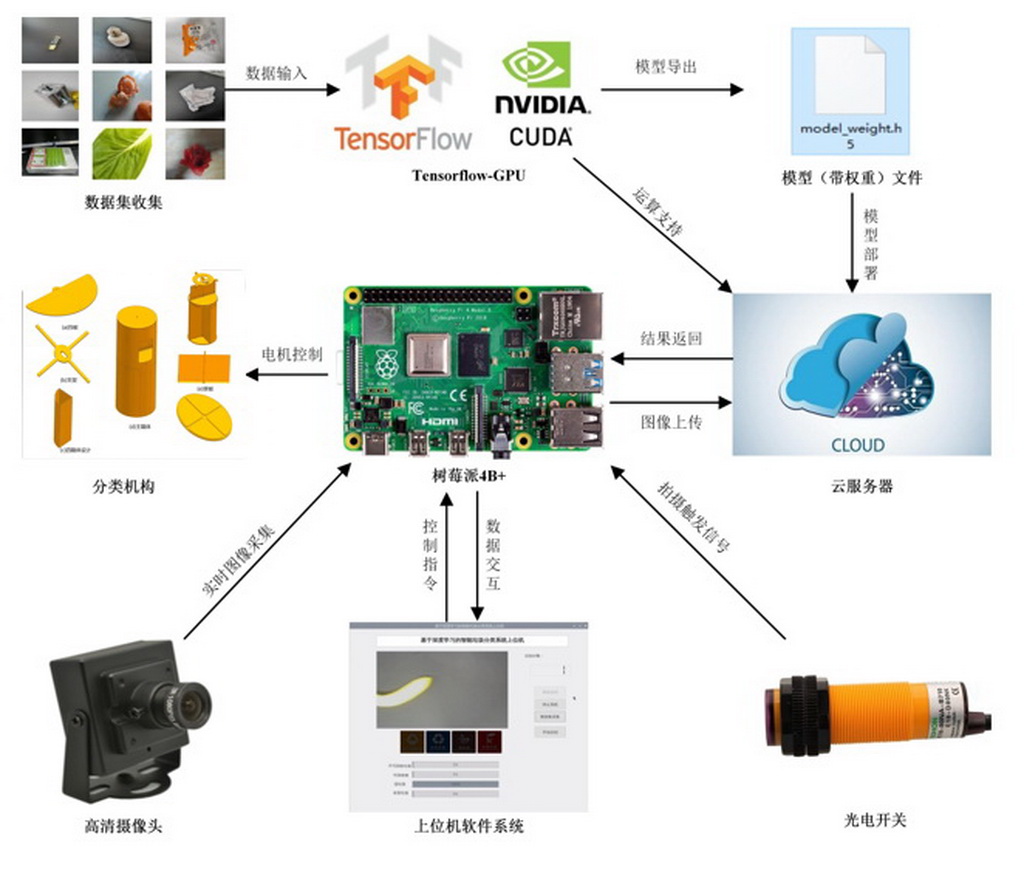
垃圾分类一直是环境保护、资源回收和社会民生的重要问题。随着经济的快速发展,人们生活水平不断提高,在消费与生产的大循环里,垃圾的数量也随之激增,这为垃圾分类的末端处理阶段增加了负荷。有效的分拣收集有利于垃圾后续的处理工作,提高工业效率,具有重要的研究价值。现有方法在精确度、成本和实时性方面难以兼顾,为此,本文设计了一种基于深度学习的智能垃圾分类系统,综合考虑工业需求,实现垃圾种类自动识别、分拣收集和可视化。 本系统以树莓派4B+板卡为中央控制器,基于Tensorflow框架,使用ResNet-50模型进行图像特征提取及分类,利用余弦退火和迁移学习策略对模型进行优化改进,实现高精度垃圾自动分类识别;考虑计算与存储需求,采用云部署方式,利用Flask技术将模型预测直接打包成http接口,通过TCP网络通讯技术实现树莓派和云端服务器数据的交互,实现快速识别;利用可编程引脚传递脉冲信号,以驱动器为媒介,通过编程进行86电机的调速与定位,进而控制方形滑板旋转,实现分类收集;设计上位机管控系统,用PyQt5结合Qtdesigner开发软件图像界面,利用LCD显示计数信息,并设计显示云端计算结果数据,实现垃圾识别信息可视化。系统的主要设计思路为:单个垃圾从传送带上料,接近传送带末端的位置设置了由摄像头和光电开关构成的传感器环节,当垃圾到达光电开关,树莓派会检测到光电开关的触发信号,从而调用摄像头获取当前帧,随后将该帧图像传输到远程服务器进行云端计算并将识别计算的结果返回。根据返回的结果,树莓派向末端的86步进电机传递信号,步进电机根据信号带动方形滑板完成相应的转动策略,最终垃圾通过方形滑板落到对应的分类箱体中。 经测试,系统进行单次垃圾种类识别的平均时间为0.114s,垃圾种类识别模型精度为97.42%,能正确识别出常见的14类生活垃圾,并正确分类为可回收物、有害垃圾、厨余垃圾和其他垃圾四大类别,很好的满足了系统功能需求。系统运行稳定,垃圾分类工作效率高,且硬件成本低,具有良好的市场前景。
基于深度学习的智能垃圾分类系统

作品名称基于深度学习的智能垃圾分类系统
参赛院校江西理工大学
指导老师杨杰、焦海宁
团队成员韩庆、许德财、王啸天、冯志成、曾志
奖项等级三等奖
竞赛年份2021


