5月28日上午,物电学院举办了第十五届福建省大学生机械创新设计大赛闽江学院赛区选拔赛。本次活动由物电学院3D设计协会承办,吸引了百余名学生报名参加。江夏学院杨拴强教授、物电学院唐晓腾副教授和陈炜博士担任评委。
比赛伊始,陈炜博士先宣读了比赛规则和评分标准。接着,参赛小组按序依次上台进行展示。展示主要分为作品讲解和作品展示两部分。当每组展示结束其他参赛小组会对该组进行评分,评分采用百分制,其中小组互评占40%,评委打分占60%。

本次机械创新设计大赛的主题为“自然、和谐”,包括两大作品主题,一是仿生机械,二是生态修复机械。具体参赛作品包括:仿生机械鱼、仿生球形六足蜘蛛机械、两栖仿生螃蟹、仿生扑翼鸟、仿生蛇等十一个项目。


作品展示
仿生机械鱼采用仿生学原理,以鱼类推进方式为参照开发的仿生机器鱼,具有高效、高机动性、低噪音以及对环境扰动小的优点。摆动推进模式的鱼类在游动时,身体前1/3部分具有很小的波幅,尾鳍部分则通过摇摆运动产生前进的推力。关键部位鱼尾部的运动选择了多舵机模块串联的方案,每一个舵机相当于一个真鱼的脊椎关节。
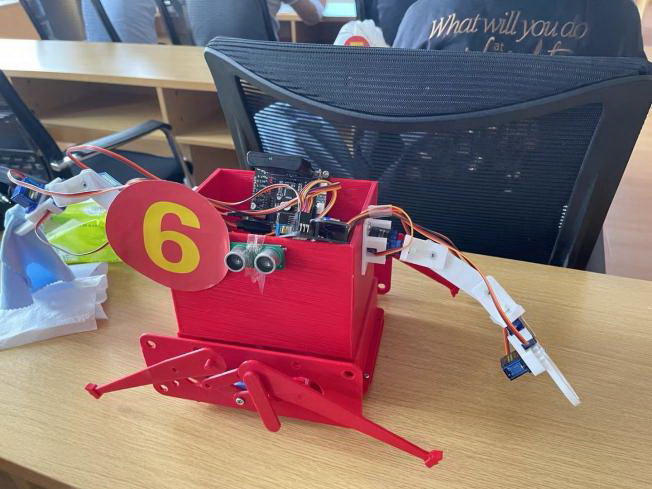
仿生球形六足蜘蛛机械是模仿多足的动物的运动的方式的特殊一种的机械。此次设计的行走步态决定用三角步态,这也是六足机械步行方式通常采用的。三角步态中,六足机械身体的一侧的前足和后足与另一侧的中足共同组成一组。其他三条足组成另外一组。关键部位腿有三个自由度,在三个自由度点上分别安装一个舵机以实现腿的自由活动,驱动系统控制舵机,以实现腿的运动。


射水鱼机械仿真以尾鳍推进方式鱼类为仿生原型,以机电系统实现机器鱼的驱动,根据不同的鱼类的身体特点对仿生机器鱼进行数字化设计。针对鱼的运动结构,其身体的构造是由多根脊椎骨相互连接而成,采用尾鳍推进的鱼类在游动时通过其脊椎曲线的波动产生推进力,因此鱼类的身体可以看作为由一系列的铰链连接而成的摆动。在完成基本运动系统结构设计后,针对射水鱼的功能在内部增加一个发射装置。


两栖仿生螃蟹基于对螃蟹的生理特性的分析,运用仿生学原理设计了一款具有创意结构的仿生螃蟹机器人系统。采用模块化设计方法,实现如夹取、搬运、避障、水质检测、温度监测等多种功能。对多足机器人进行研究,可以利用其特性完成对复杂环境的监测,为人们从事相关工作提供便利。

仿生扑翼鸟通过分析鸟类翅膀的空间及鸟类飞行时扑翼的运动轨迹,设计出一种模拟鸟类飞行的仿生扑翼机器人。核心机械部分由齿轮组及机翼连杆组成,具有结构紧密可靠,稳定性强的优点。该作品使用stm32芯片作为主要控制器,采用esp8266芯片远距离通信实现机器人的遥控飞行。



经过各参赛小组的出色比赛,最终产生一等奖2名、二等奖4名、三等奖5名。最后,由评委老师对此次比赛进行指导点评并为获奖小组颁发奖状,第十五届福建省大学生机械创新设计大赛闽江学院赛区选拔赛圆满结束。

闽江学院机械创新大赛获奖情况
序号 | 作品名称 | 团队成员 | 指导老师 | 获奖情况 |
1 | 基于Arduino的仿生六足机器人 | 组长:陈力雄 组员:侯一航、戴杰、郭宛霖、张世龙 | 林秀芳 | 一等奖 |
2 | 仿生机械鱼 | 组长:曾勇辉 组员:林美佳、俞洁璐、潘永宁、汤文悦 | 吴宁钰、章亮 | 一等奖 |
3 | 适用于复杂地形的六足机器人 | 组长:林宇豪 组员:赖珊珊、党冠一、黄子键、柯诗宏 | 郑祥盘、陈炜 | 二等奖 |
4 | 水面垃圾桶 | 组长:黄宇 组员:梁文辉、郑宇翔、林俊杰、李祥 | 吴宁钰 | 二等奖 |
5 | 仿生球形六足蜘蛛机械 | 组长:陈德楷 组员:卢冠锐、罗鸣、高泯翔、魏孝旭 | 王兆权、吴宁钰 | 二等奖 |
6 | 仿生扑翼鸟 | 组长:林小馨 组员:林杰鹏、阮承钰、王昊航、吴恩强 | 林立霖、王兆权 | 二等奖 |
7 | 仿生机器蛇 | 组长:王文彬 组员:洪依、陈松青、王坤 | 吴宁钰、林立霖 | 三等奖 |
8 | 基于boson造物粒子声光电路测声电子蝉 | 组长:林晖 组员:许荣智、张晓欢、陈博、陈佳奇 | 王建彬 | 三等奖 |
9 | 仿生六足机器人 | 组长:陈浩 组员:张阳、李杏婷、严钰瑶、袁芸 | 唐晓腾、黄小琴 | 三等奖 |
10 | 两栖仿生螃蟹 | 组长:陈郅健 组员:练伟杰、许揄扬、李晨、吴俊雄 | 吴宁钰、王兆权 | 三等奖 |
11 | 射水鱼机械仿真 | 组长:陈婷 组员:巫俊琳、吴晓萍、杨婧妍 | 唐晓腾 | 三等奖 |