



作品名称扫地机器人
参赛院校四川轻化工大学
指导老师石睿、朱文忠
团队成员张子涵、林华焜、杨波、方世林
奖项等级三等奖
竞赛年份2021
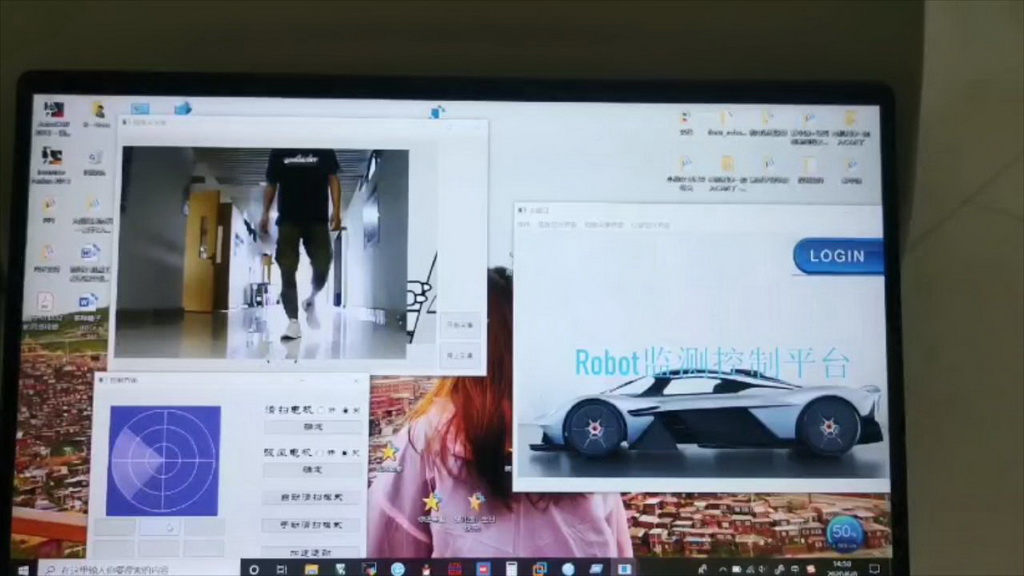
伴随着生活水平的提高,人们对生活品质的要求提高,越来越多的服务型机器人应运而生,比如排爆机器人、搬运机器人、扫地机器人等等, 未来的智能移动机器人应当在以下几个方面着力发展;面向任务(解除功能固定化,实现一机功能多样化),传感技术、定位技术和集成技术。 本文介绍的一种基于CAN和WIFI的多功能机器人系统设计是利用CAN总线通信技术,WIFI通信技术和传感检测技术,在Linux和FreeRTOS两大操作系统的开发平台下实现的多功能控制系统,该机器人具备自主清扫及远程控制定点清扫,图片采集,视频监控,室内温度实时检测等多种功能。配套开发的APP和电脑端的上位机界面,提供人机交互接口,使人们可以随时向机器人下达工作任务。


