

作品名称浮萍清理机器人
参赛院校长春理工大学
指导老师王鹏、权巍
团队成员汪洋、张庭聚、姜峪、李永杰、姜宇
奖项等级三等奖
竞赛年份2022
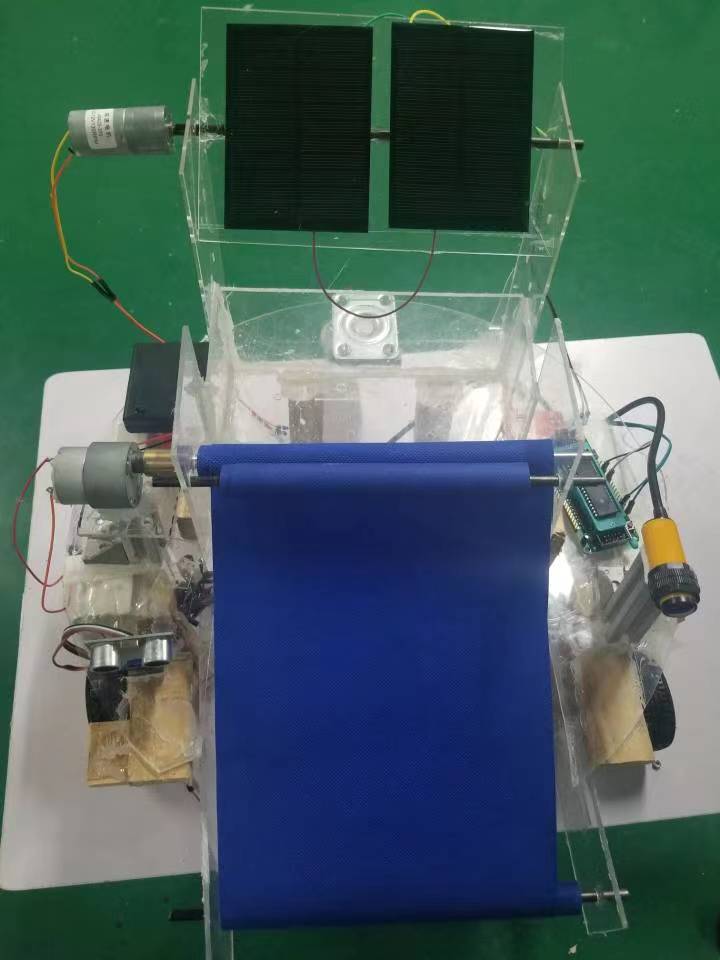
本作品是一种针对于水体藻类清理的设备,对极易富营养化的湖,鱼塘等水体做清洁处理。 设备由收集存储装置、动力装置、声呐感应、避障系统、控制装置五部分组成。分别包含自动和半自动控制两种控制方式,其前端有声呐传感模块,检测到大型障碍物时会自动避让,由后端发动机驱动向前,前端的传送带收集,收集到的藻类由中部滚筒进行处理以减少水分,并由传送带传送至储存部位,顶部有太阳能收集光板,可自行收集太阳能进行存储。 本机器人使用自动控制和半自动控制两种控制方式,既可以人工遥控也可以将设备放入水体后仍其自由收集,其前端有声呐传感模块,检测到大型障碍物时会自动避让。 设备在水体中运行时,由后端发动机驱动向前,前端的传送带收集,收集到的藻类由中部滚筒进行处理以减少水分,并由传送带传送至储存部位。当收集装置内收集的藻类达到一定量时设备自动返航到初始位置,将所收集到的藻类卸下并进行再次运作。 实现了对于因营养过剩引起的水面藻类或浮萍爆发而造成的水面污染的清理,并对所收集的浮萍和藻类进行二次利用实现污染物的有效利用。通过自动运行与手动控制相结合的操作系统,节约人力,高效运行,精确收集。


