


作品名称图书管理机器人
参赛院校山东科技大学
指导老师陈波、王涛
团队成员盛圆圆、卢广绪、张德鲁、孟繁骁、布金涛
奖项等级二等奖
竞赛年份2022
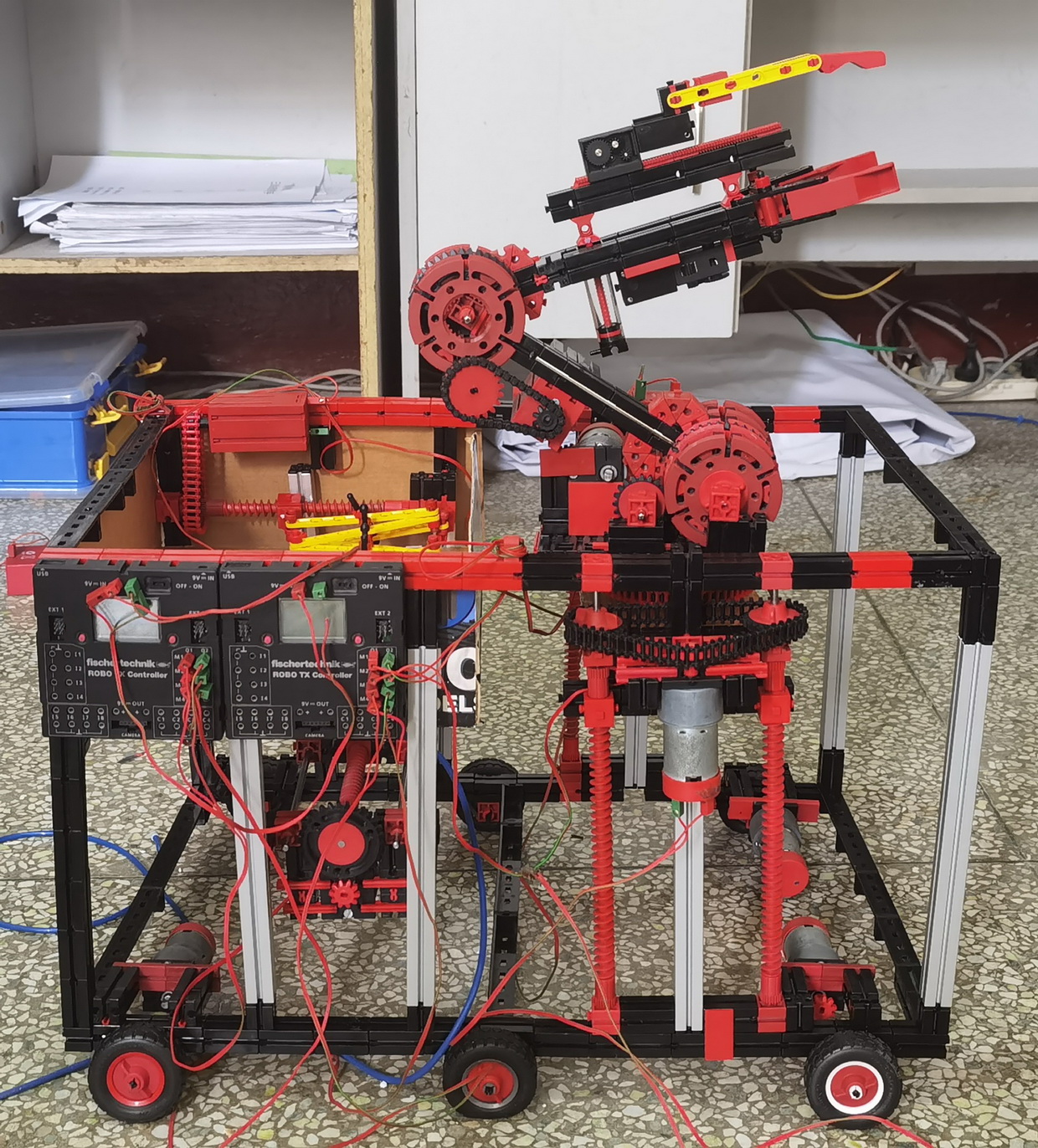
近年来,随着我国对精神文明建设的重视,图书逐渐成为人们日常生活的常用品。但家庭书屋内的图书摆放杂乱,为了满足书籍的管理需要,实现图书管理的智能化,提高人们阅读的幸福感,引进图书管理机器人成为有效途径之一。 本团队利用慧鱼模型,设计了一种新型图书管理机器人,该机器人可实现图书的快速归类、借阅、收纳与归还,操作简便,实用性强。 机械结构方面,本作品主要由行走机构、升降机构、仿生机械臂、旋转机构以及书箱组成。升降装置和仿生机械臂可实现高度的调节和机械臂的旋转,保障该机器人能够适用于各种高度的图书架;所采用的机械臂模仿人的手臂关节动作,前部机械爪模仿三手指抽拉、夹取姿态,可实现对书本的灵活抓取;旋转机构通过电机配合链条实现机械臂由书箱到书架的转向;机器人配备的书箱可实现书本的有序排列以及书本的顶起。 同时,该机器人采用基于机器视觉的图书识别系统可有效识别所拿取图书的信息,并根据图书自带的条形码可有效识别出图书的具体信息,确保夹取图书的正确;采用红外线避障和超声波避障结合的避障方法,可解决超声波对松软界面的难监测问题以及红外线对透明物体的检测困难问题;另外,该机器人采用基于路标导航的方法,实现了固定标记和机器人位置感应,且可以通过使用偏差角来校正机器人的前进方向。 在制作过程中,团队成员对图书阅读需求做了详细调研,利用慧鱼模型,制作出的图书管理机器人,可实现借书与还书的过程,给智能化图书管理提供了一种切实可行的创意设计。本作品的机械结构设计符合装配、力学性能以及外观要求,具有广泛的市场前景。 通过团队成员的合作,我们制作出了样机模型,设计处巧妙的机械系统,并对其控制系统进行了调试,实现了预期功能,验证了系统的可靠性和实用性。


