

作品名称基于重心调节与仿生软体的水质检测机器水母
参赛院校河南理工大学
指导老师樊钰超、李树平
团队成员党志忠、黄春光、刘亚鹏、田雨馨、方帅盼
奖项等级三等奖
竞赛年份2022
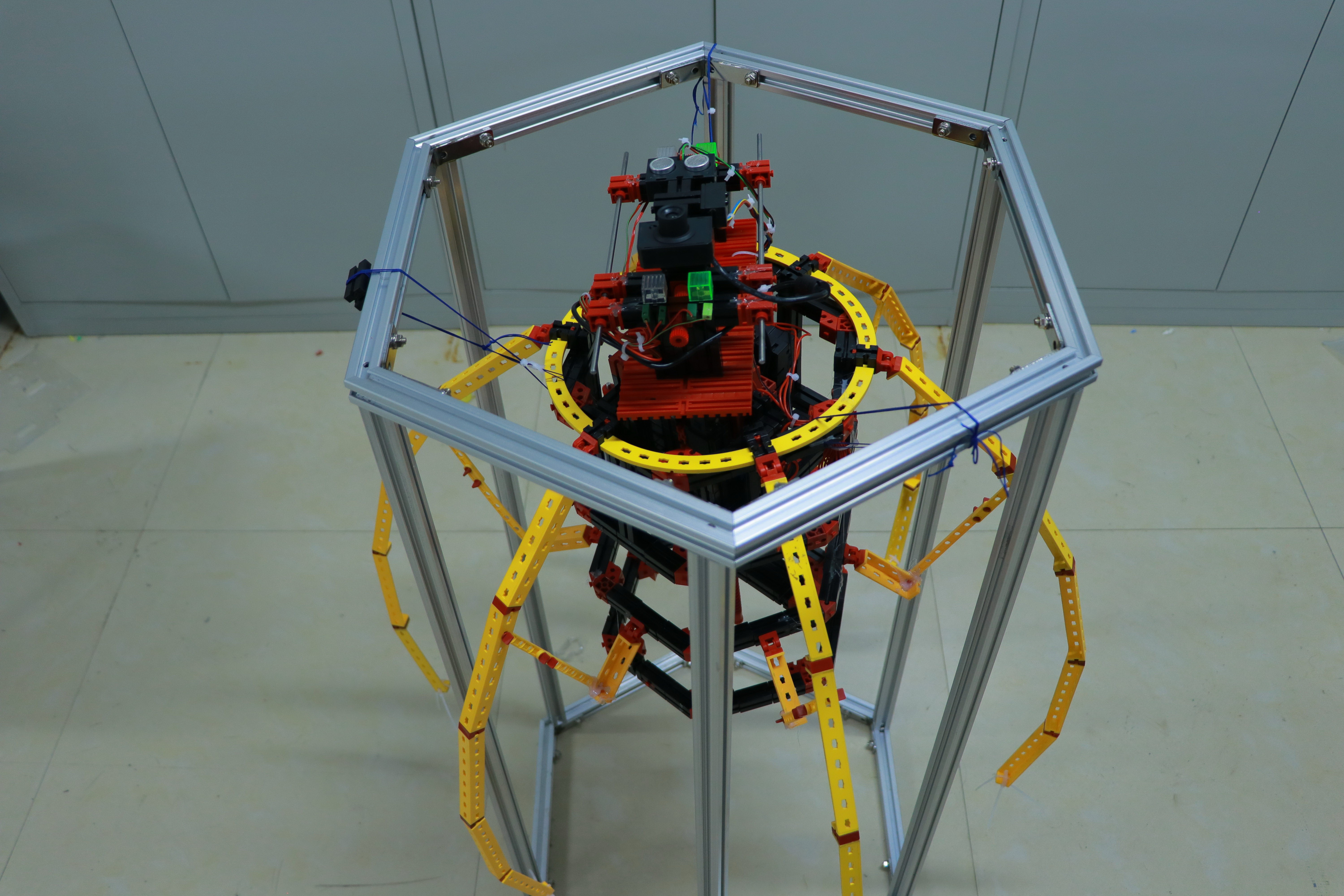
目前市面上存在多种水下机器人,但主要采用螺旋桨进行推进,存在噪声大、灵活性差、不能较好适应水下暗流等复杂环境、造价高、隐蔽性低等诸多缺陷。在此基础上本团队根据水母的生物机理设计了一种基于重心调节与仿生软体的水质检测机器水母。作为一种集浮标技术与水下机器人技术于一体的新型仿生水下航行器,仿生机器水母可以实现全自主、长时间、高稳定性的水下工作,工作时靠自身体积的变化实现推进。首先外伞伞体收缩会导致内腔体积减小,进而将腔内的水喷出,在推力的作用下带动水母移动。仿生机器水母头部后方加有超声波装置,检测到障碍物时就会开始减速,实时进行避障沉浮。摄像头安装在水母头部的丝杠上,实现及时数据回收。 基于重心调节与仿生软体的水质检测机器水母集多优点于一体,打破传统运动方式,提高水质检测的同时大大降低了生产成本。该装置的研发将在海洋环境监测、海洋资源勘察、海洋科学研究中发挥重要作用,具有广泛的应用价值。


