

作品名称关于小型移动平台的研究
参赛院校北京工业大学
指导老师于乃功
团队成员胡皓原、朱蠡远、张弛
奖项等级三等奖
竞赛年份2022
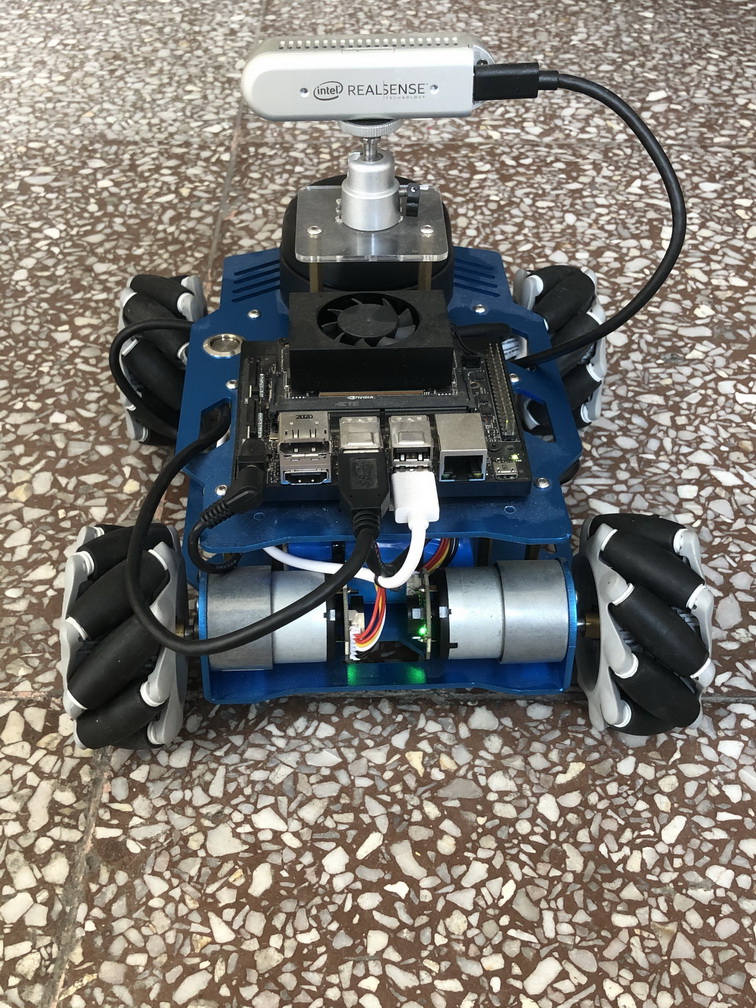
首先本设备将开发环境的网络与机器人的AP相连接,通过局域网与机器人进行通讯。在可以实现通讯功能的基础上,我们使用ssh工具远程连接机器人,实现远程控制机器人的启动停止和代码编译等。为方便工程开发以及代码修改,我们使用nfs工具将机器人工作空间下的所有代码挂载到ubuntu开发环境中,从而实现在开发环境中远程修改机器人代码以及开发新的功能。在ROS组网的基础上,我们在启动机器人底盘节点前,更新了机器人系统的时钟。除此之外,我们的设备不光可以使用PS2遥控,还可以通过arbotix_gui控制机器人的移动。我们的设备中还有激光雷达,可以扫描周围环境。配合上乐视深度相机以及不同的建图算法,我们可以实现机器人的移动建图,也为后续机器人导航功能的实现,打下了坚实的基础。


