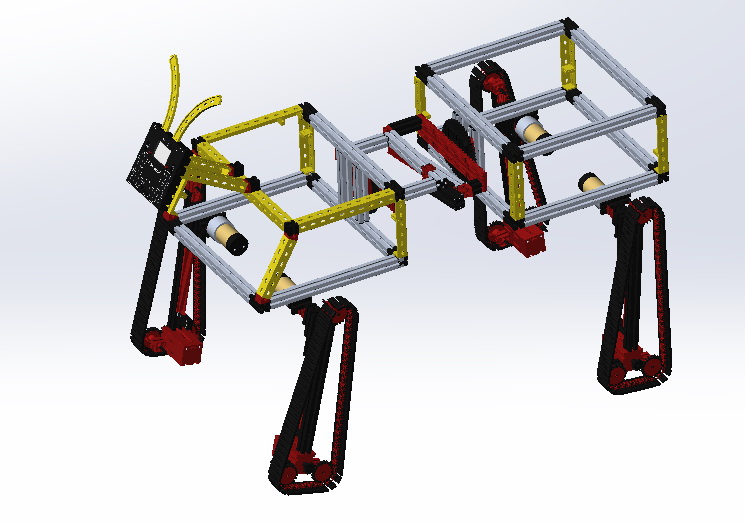
(1)应用领域和技术原理、用途; 仿犬类步态及腰椎动作的可变径机器人采用四足关节式履带驱动设计,可模仿犬类步态、四足同时驱动、仿犬类爬行(仿坦克行走),对多种复杂地形路径,都具有很强的适应性。该机器人中间有脊椎式机构连接,可以改变机体形态,整体能够通过复杂的路径。也可以作为新型玩具或者教具,对学术或者儿童在认识自然、掌握犬类的外形特征发挥作用。 (2)技术性能指标; 宽度约为40cm,高度和长度处于可变范围内,高度为30~60cm,长度为60~85cm。速度在仿犬类步态状态下为30m/min,在四足同时驱动状态下约为80m/min,犬类爬行状态下约为130m/min。 (3)作品的创造性、先进性、可行性、实用性; 机器人采用履带式的行走方式,接触面积大,产生的阻力能够较好的保持行走稳定问题;四条腿上的摆臂履带均采用相同功率的电机驱动及后轮驱动,保证机器人运行过程中质心的稳定性;四个摆臂的摆动范围设计为360度回转,使得及其能够越过各种障碍物,增加机器人的灵活性;装有电动齿条,该装置可以改变履带的质心和履带有效长度,从而可以完成多地形的越障;采用脊柱式连接方式,身体运动灵活,能够轻松完成转向问题,并可以通过俯身、下爬等运动状态模仿小狗的真实状态。 (4)作用意义; 机体的整体结构有较高的仿生性。作为工作机器人,可以搭载多种传感器和工作组件,能完成复杂的工作任务;作为陪伴型机器人,可以模仿出宠物的多种姿态。整体来说该机器人是一个十分优秀的智能仿生平台,可以适配多种使用需求,满足人们工作及日常的智能仿生机器人使用需求。 (5)推广应用前景、效益分析与市场预测; 随着多足机器人的基础理论与相关技术的发展,四足机器人在地形探索、生物仿生、特殊任务执行等领域都有着普遍的应用价值与研究价值。现在市面上的大多数四足机器人稳定性较差,环境适应性差,无法适应复杂地形,该四足机器人模仿犬类的四肢和脊柱,实现多个自由度以及越障工作。该机器人可作为儿童玩具,将仿生应用于儿童玩具的设计中,可带来极大的市场效益。
仿犬类步态及腰椎动作的可变径机器人

作品名称仿犬类步态及腰椎动作的可变径机器人
参赛院校山东科技大学
指导老师陈波、郭凡灿
团队成员卢广绪、王煜、刘吉川、商晓寒、焦贤运
奖项等级二等奖
竞赛年份2022


