



作品名称基于EfficientNet的云服务垃圾分类信息系统
参赛院校上海工程技术大学
团队成员袁文鹏、林创栩
奖项等级三等奖
竞赛年份2022
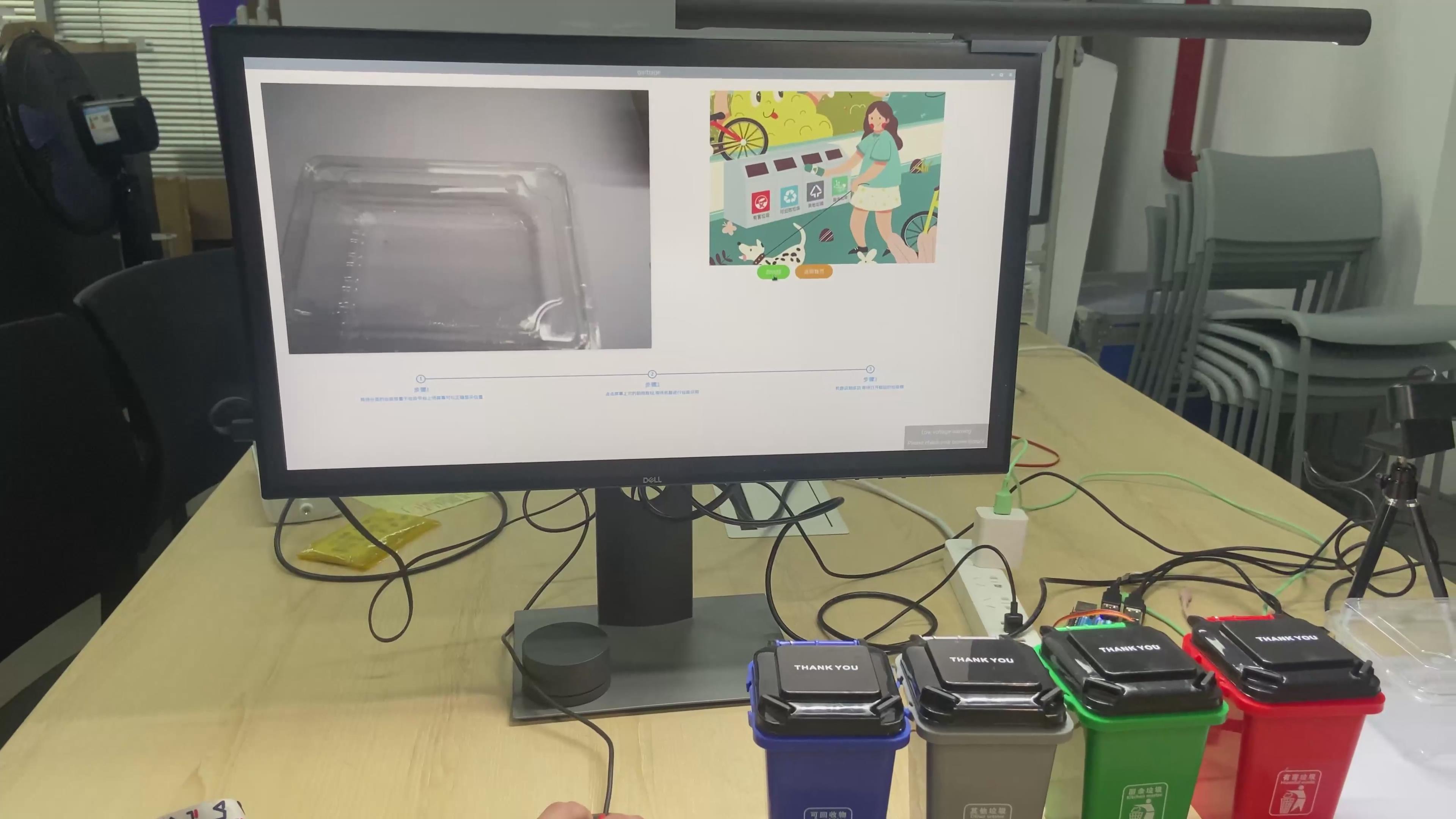
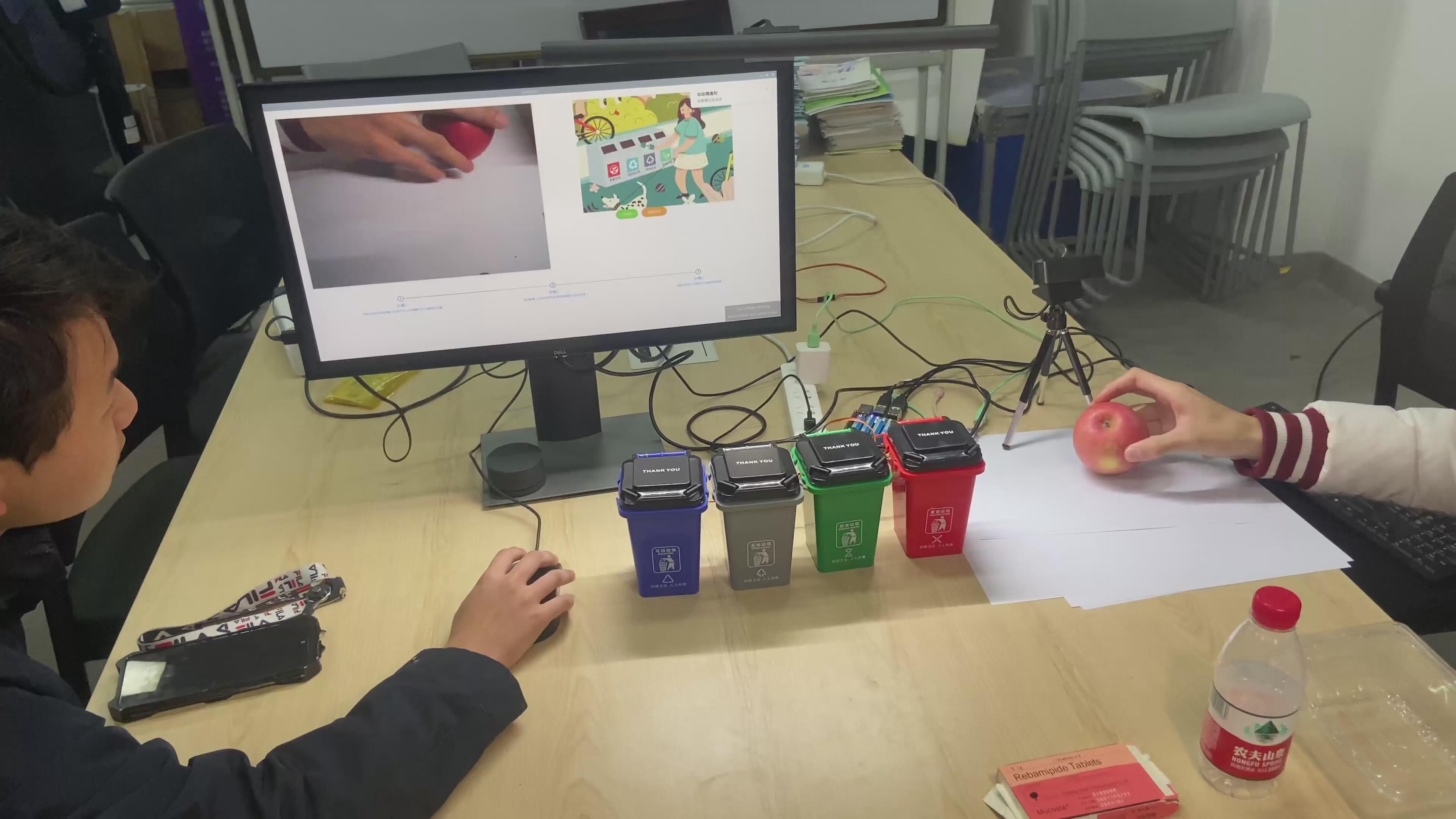
本作品的设计思路是以树莓派为主体平台,依托云服务接口,最终在树莓派上实现完整的系统。该系统由现场图片采集端和云服务提供端,以及微机驱动单元组成。本地端以树莓派作为其主控核心通过HDMI显示器进行显示,使用PWM信号发生器PCA9685作为舵机控制器,控制软件采用Python语言设计,图片采集器使用E12摄像头。远程服务端使用EfficientNet模型为本地端提供服务,可根据本地端设备的数量和需求,动态规划云服务算力。远程服务端会对树莓派发送的图片进行判断,并将对应的垃圾分类结果返回给树莓派,此后树莓派会通过PCA9685控制舵机打开对应的垃圾桶。经测试验证,该系统实现了本地端与远程端的交互、图像识别、图片获取、垃圾桶自动开合等相关操作,满足垃圾分类相关需求。因此,该作品可作为产品原型,具有良好的市场应用前景。


