


作品名称环境卫士-基于IOT与视觉识别的垃圾拾取车
参赛院校黑龙江科技大学
指导老师李宏伟
团队成员刘腾霄、贾恒、李海洋、李睿莹、刘俊豪
奖项等级三等奖
竞赛年份2022
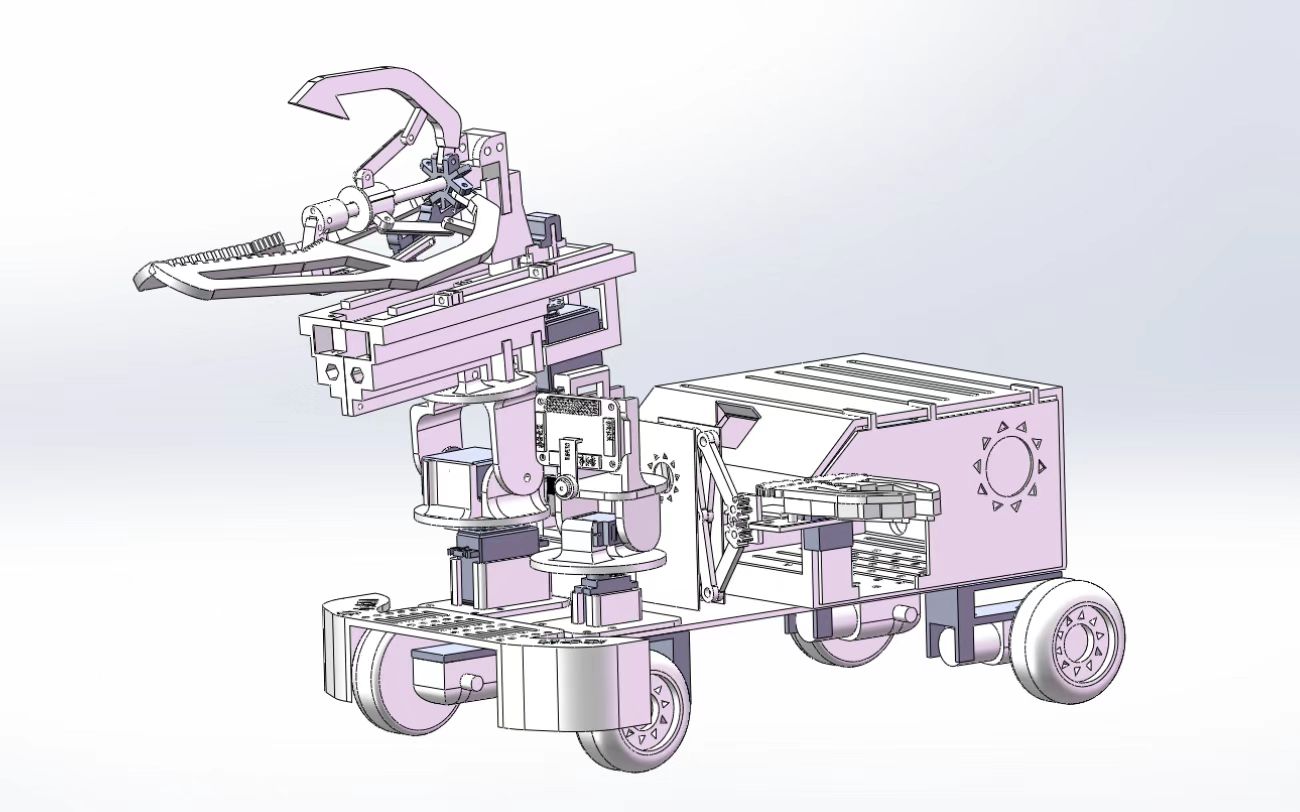
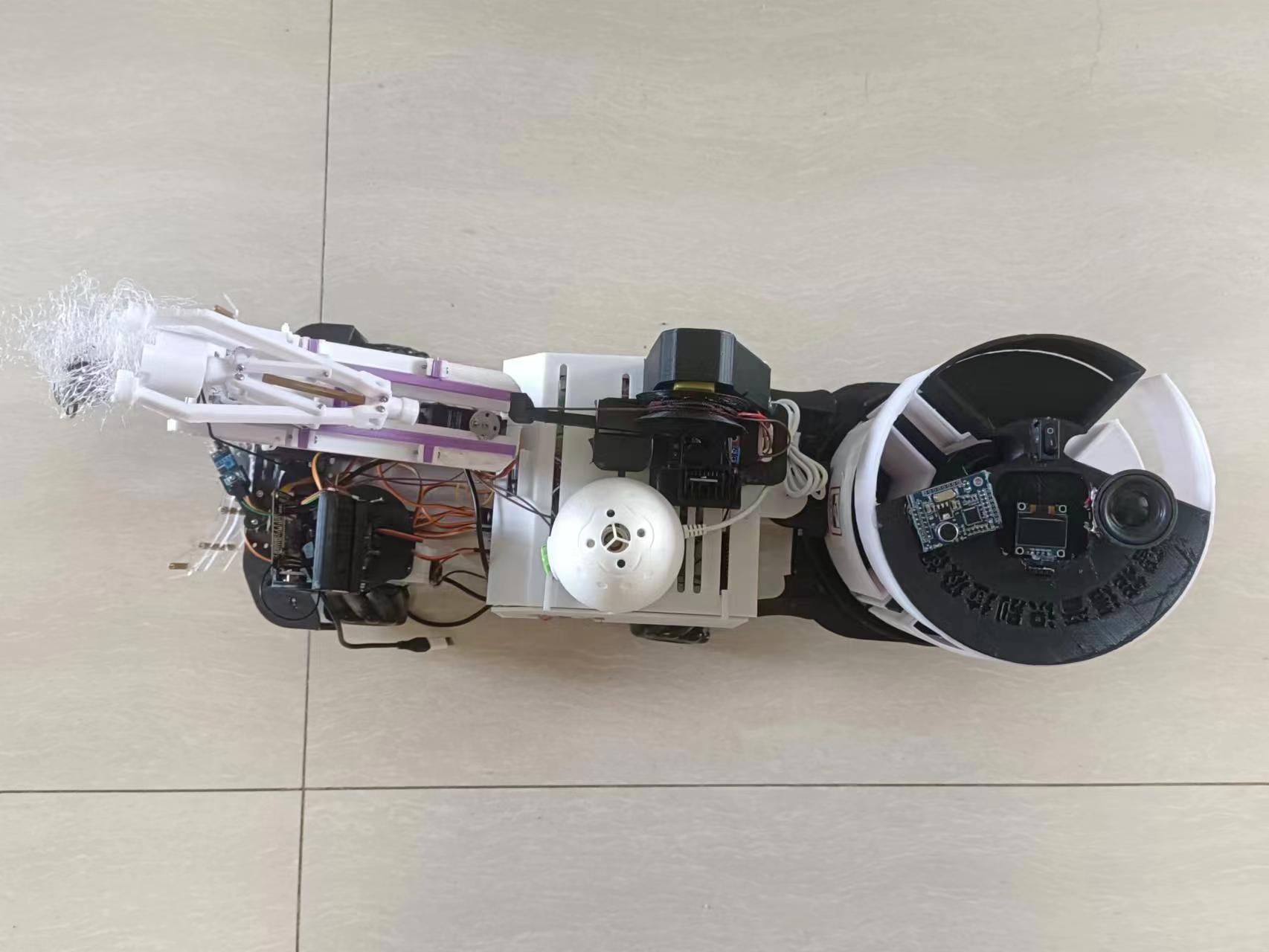
据我们团队调研得出环卫装备的研发都集中在垃圾的运输、垃圾的装载、垃圾压缩等方面。但是在垃圾收集方面依然存在着空白,垃圾收集普遍采取人工收集,具有人工成本高、用工难、工作效率低下、且易发生安全事故等多个问题,一直困扰着资源回收行业。基于上述问题,在保障环卫工人的人身安全的前提下,为了更好的进行垃圾的收集分类处理,推进社会生态环境的美好发展,我们独立自主设计了一款纯电动垃圾抓取、运送小车。主要用于偏远危险地区垃圾拾取,例如在河中、树枝上、等在清理过程危险系数较高或清理难度较大的垃圾进行拾取,也可用于危险地带如悬崖峭壁上的拾取工作。本作品是一款拥有全方位灵活机械爪可实现垃圾抓取及运送的纯电动小车,具备中程、近程、抓取能力。在遇到深沟、湿滑地区或者一些危险地带及水中漂浮垃圾可以远距离发射拾取器拾取。小车还具有语音识别和自动分类垃圾的功能,将垃圾放入到装有不同类型的垃圾桶中。 基于IOT与视觉识别的垃圾拾取车通过电机驱动轮进行移动,由计算机视觉识别、仿生机械臂、负压发生器、车载传感器等电、机、光、液、控制、检测等各种无机元器件组合而成的灵活、可靠的在各种复杂环境下完成一系列任务的机器人。其主要功能是在疫情管制的小区进行日常巡检消毒、根据垃圾体积大小、类型、形状等特征采取不同方式进行清理、将垃圾进行分类回收等。该机器人还可以用于景区垃圾的处理,采取发射抓捕网的方式进行垃圾回收,大大减少了工作人员在悬崖、沟壑等地区进行垃圾处理的危险性。因此具有广阔的应用前景和市场价值。


