






作品名称基于Arduino的智能爬楼梯机器人
参赛院校长春工业大学人文信息学院
指导老师于晓慧、高嵩
团队成员余浪、于子涵、刘丽萍、马琬璐
奖项等级三等奖
竞赛年份2022
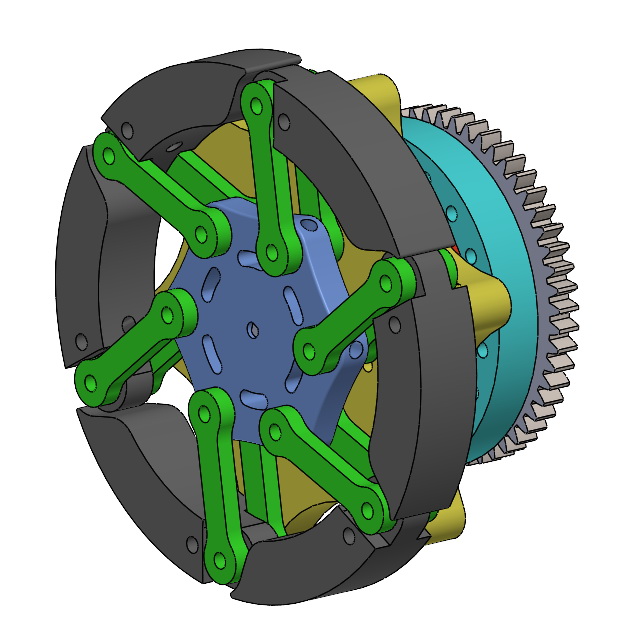
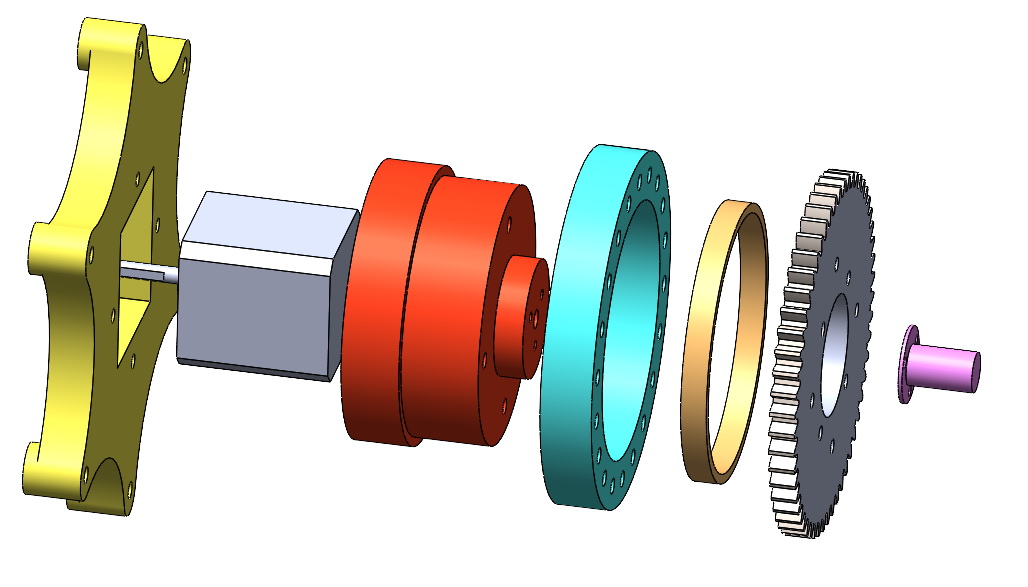
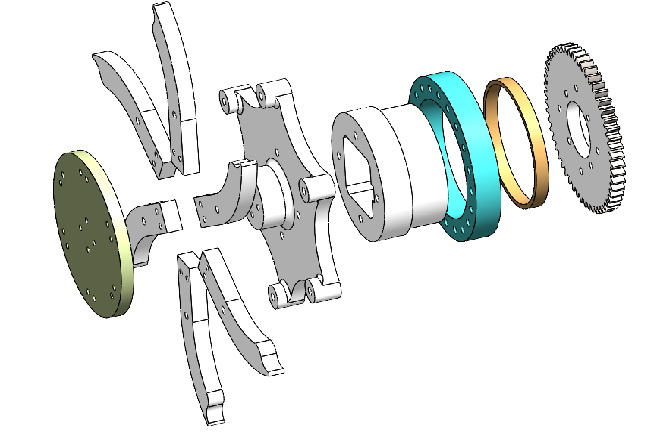
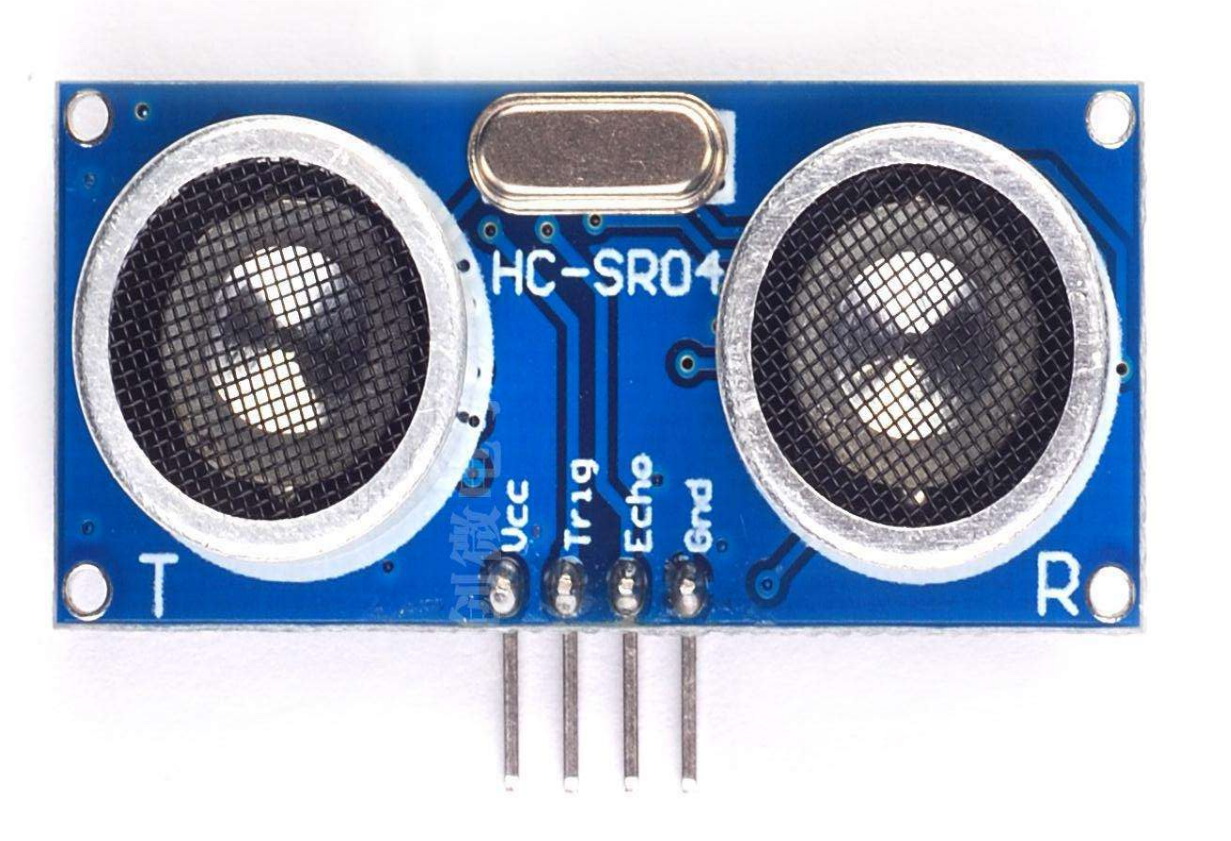
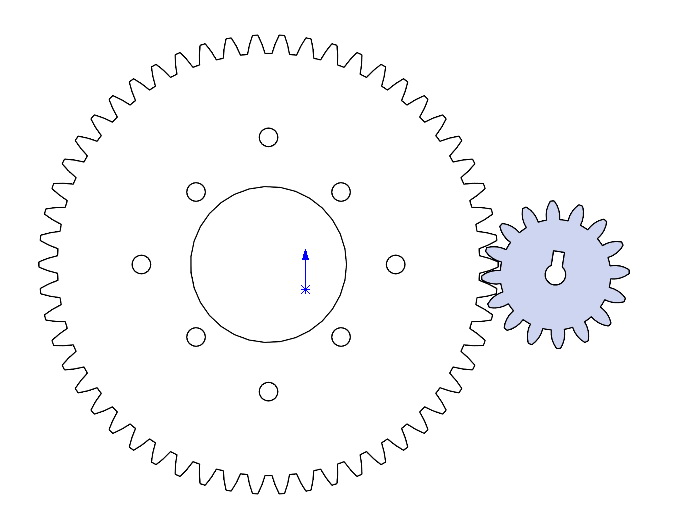
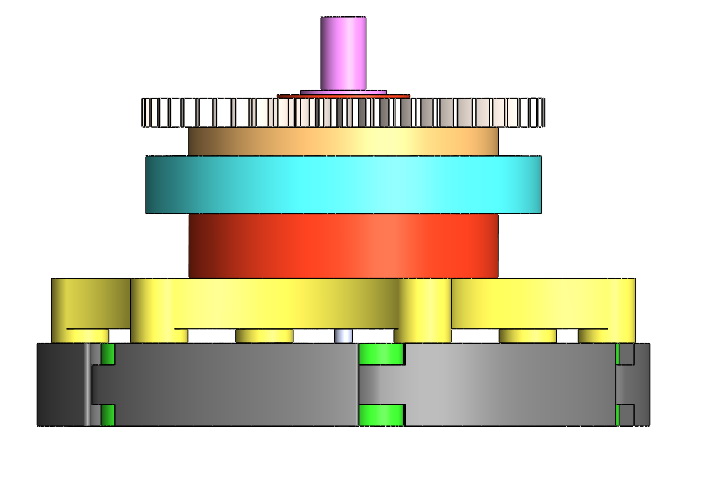
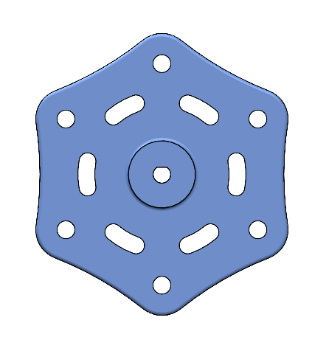
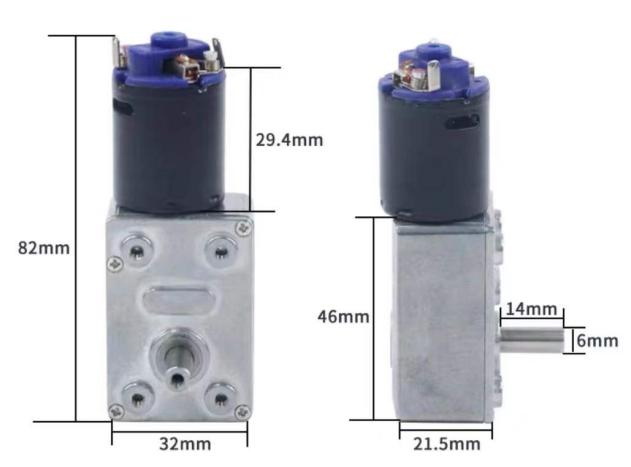
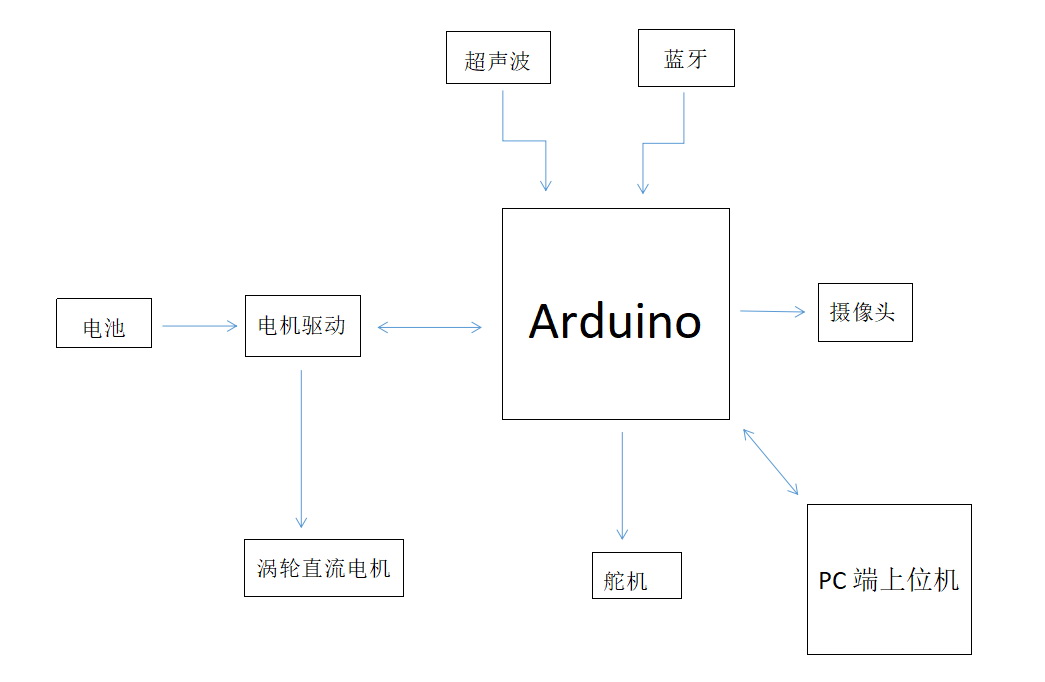
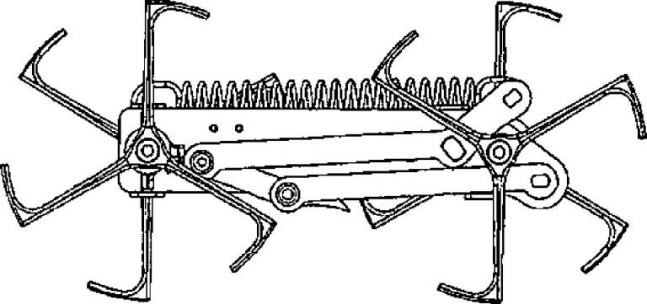
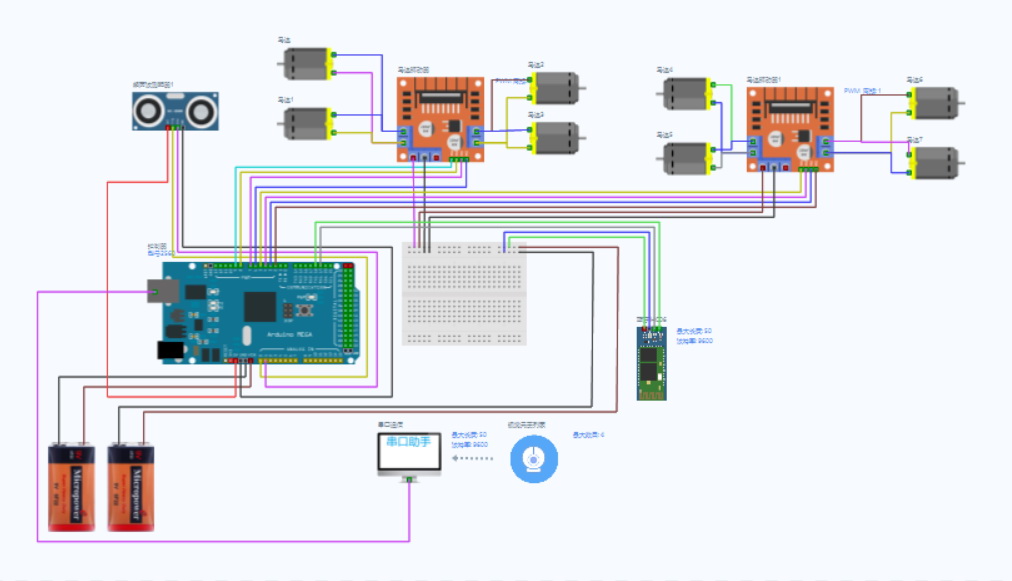
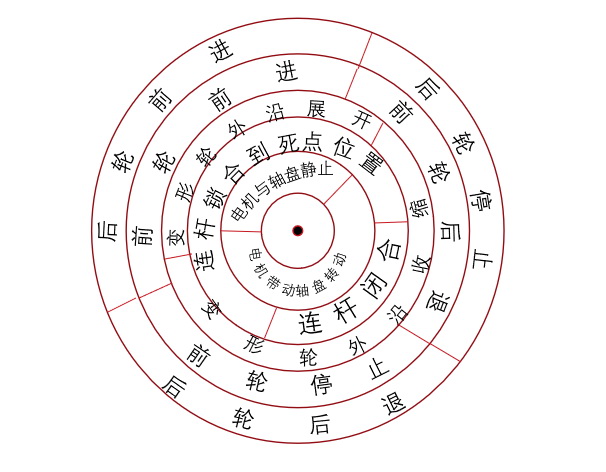
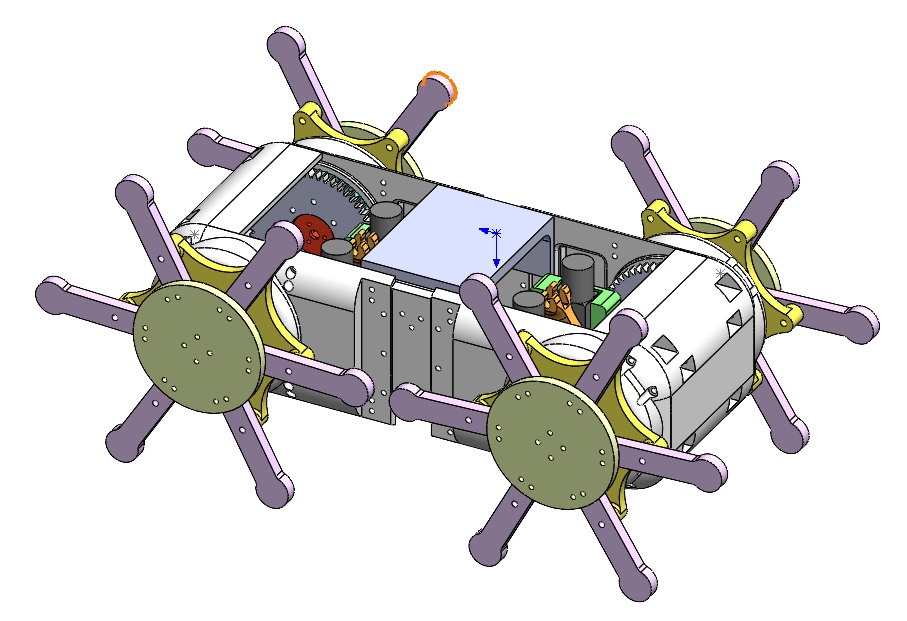
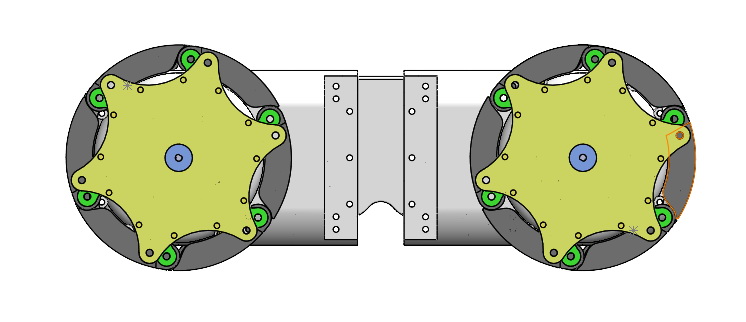
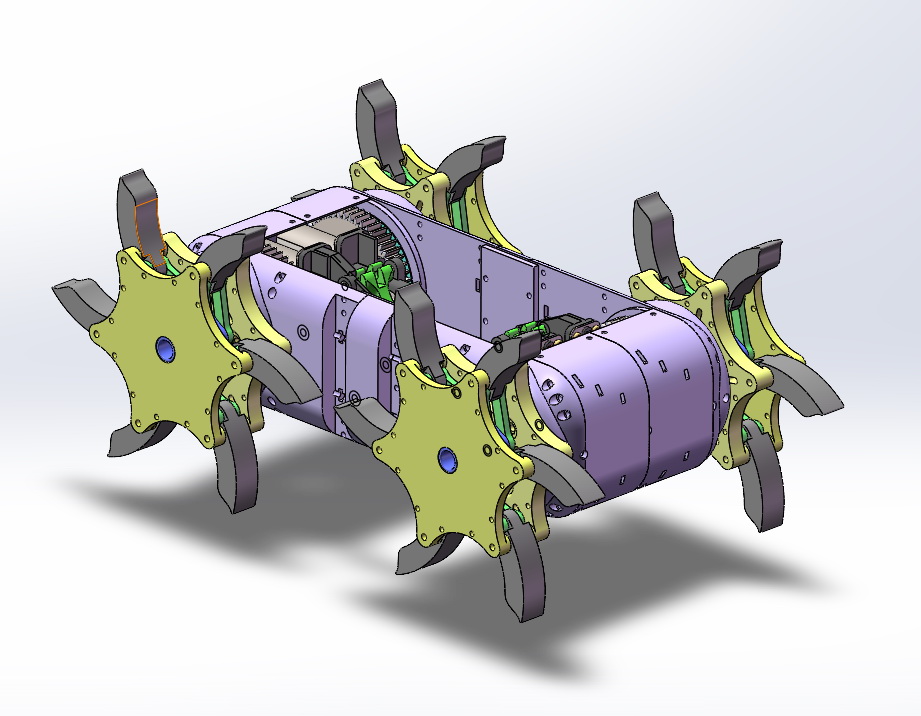
作品名称:基于Arduino的智能爬楼梯机器人。实现工能:1、往复运动:在上楼梯的基础上添加下楼梯的功能。2、稳定行进:采用变形轮式结构,显著减少重心上下波动的领率,提升稳定性,3、快速性:在相对平稳的地面与斜坡 上可调整轮式姿态为圆形轮,保证行进的平将性与快速性、4、避障:通过超声波模块,蓝牙HC-06模块以及摄像头openmv模块来实现周围坏境感知,四轮采用多电机独立驱动,在需要小车转弯时驱动一侧的车轮旋转,并调整相应转速从而实现原地的转动。大多数爬楼梯机器人单一的工作形态难以针对不同的环境,存在适应性不强的问题,最终决定以Arduino机器人为基础,结合变形轮,使机器人行进姿态能够随所处环境进行调整,从而确保移动机器人在实现越障功能的同时也能维持高速稳定的行进。


