



作品名称仿生高空清洁管家
参赛院校江苏大学
指导老师纪冠亚
团队成员潘君、衡鹏宇、严昊、贾丙奇、彭漫淮
奖项等级国赛一等奖
竞赛年份2023
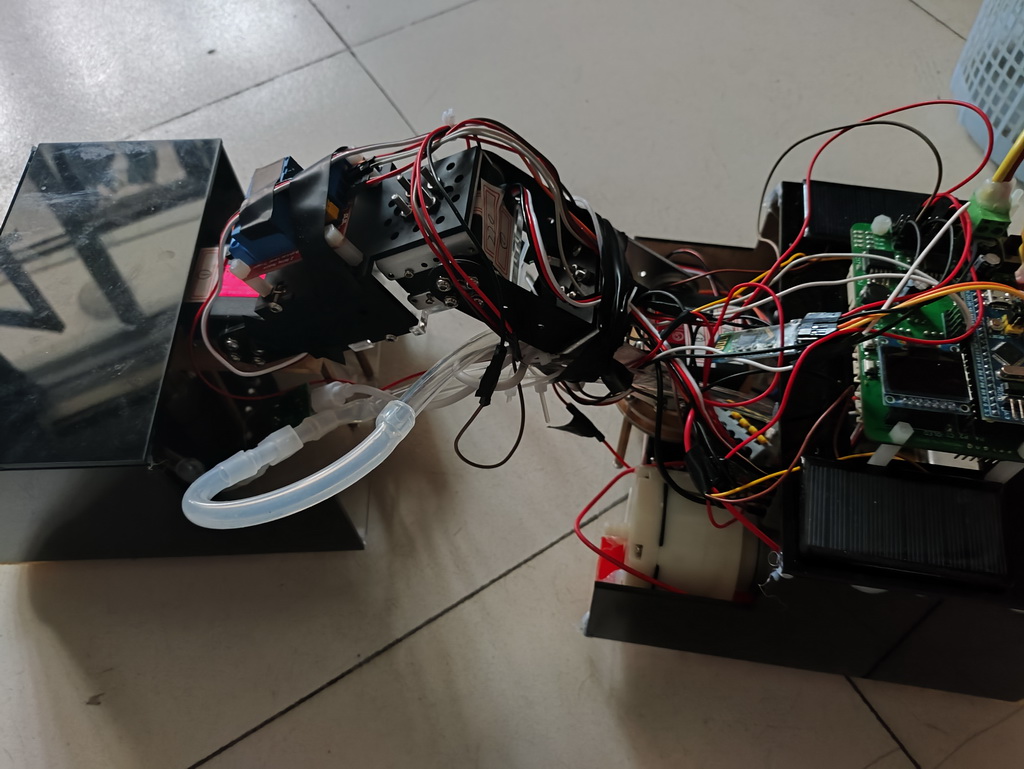
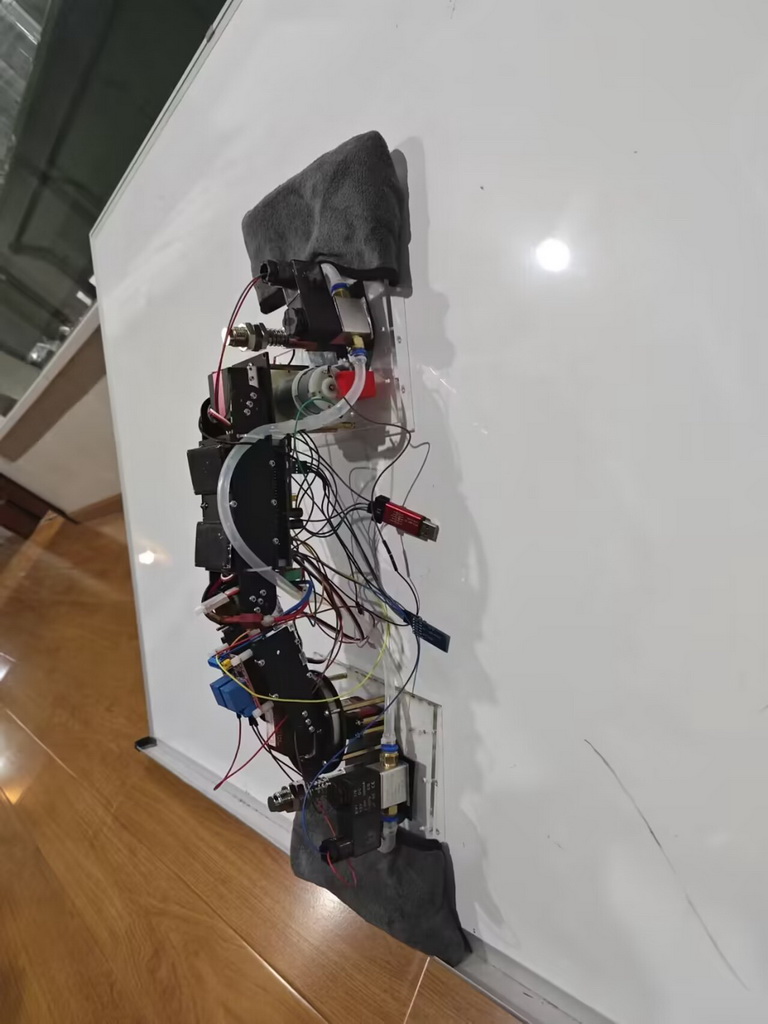
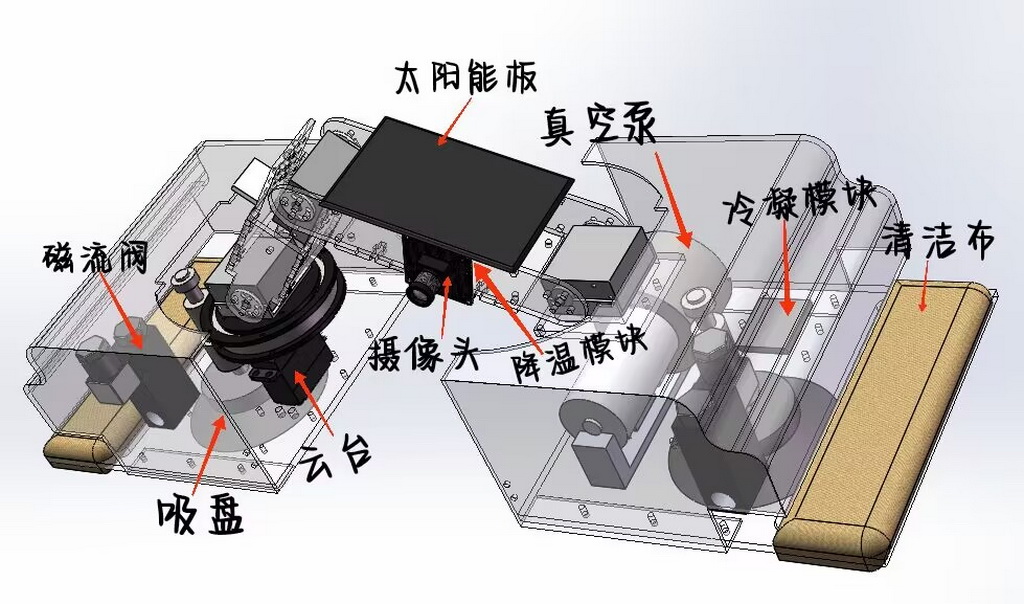
本文设计了一种基于STM32单片机的仿生自供能式高空清洁管家,结合市场上仿生机器人的清洁功能和自供能设计,制作出了这样一款自供能式仿生高空清洁管家。舵机控制模拟爬行动作,轻量化的设计,使该机器人便于保存和携带。 该机器人灵感来源于毛毛虫,毛毛虫仿生功能的实现依靠气泵使两个吸盘轮流吸附,并依靠中央的舵机控制主体的开合转动来实现各种移动,同时吸盘部位的舵机可以随时进行转向,对机器人前进的方向进行调整,这个功能赋予了该机器人较高的灵活性。该机器人中央的舵机控制两个吸盘的张合与抬升,可以跨越多种障碍物,既可以自动跨越网格,清洁平面,曲面玻璃外墙,也可以遥控清洁指定区域。清洁适用领域广阔,普适性好。清洁玻璃时,一个吸盘固定,吸附在玻璃上,另一个借由吸盘旁的清洁布来回擦拭,从而达成清洁效果。该机器人可用于多种光滑表面的清洁,如:冰箱表面,柜子表面,黑板表面等。该机器人可以代替人工清洁,降低了人工清洁高层建筑外墙的风险,与此同时还可以节约能源,减少碳的排放。在此基础上,考虑到机器人的工作时间可能比较长,以及电池的频繁充电可能会降低机器人的工作效率,我们在上述基础上增添了自供能模块,利用太阳能的清洁性和可再生性,对供电模块进行了增加续航的改造提升,实现了双模供电,保证了机器人的可持续运行。


