
作品名称越山之盾—支护型智能化掘进机
参赛院校山东科技大学
指导老师孟祥谦
团队成员孙德霖、张玉宸、王雪晴、徐可超、胡雅芬
奖项等级一等奖
竞赛年份2022
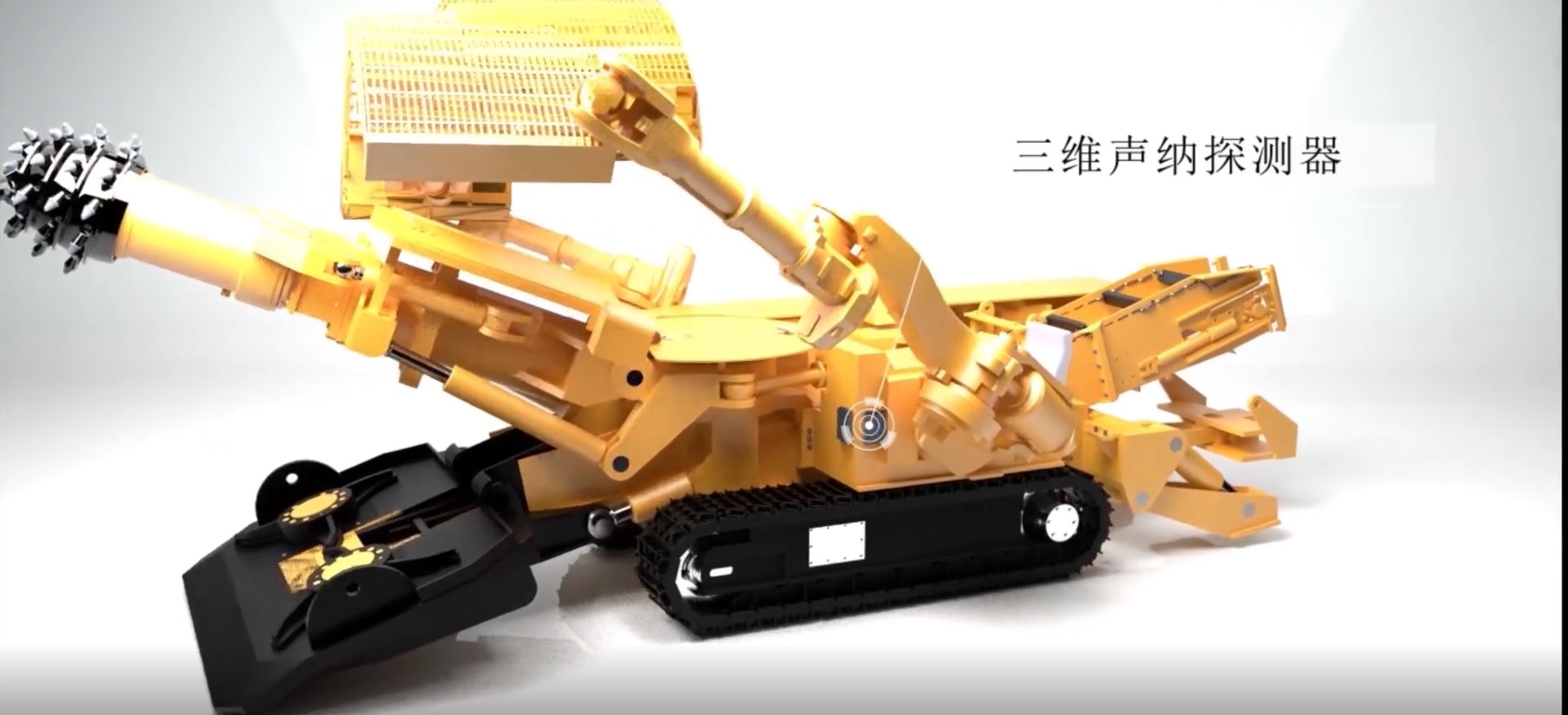
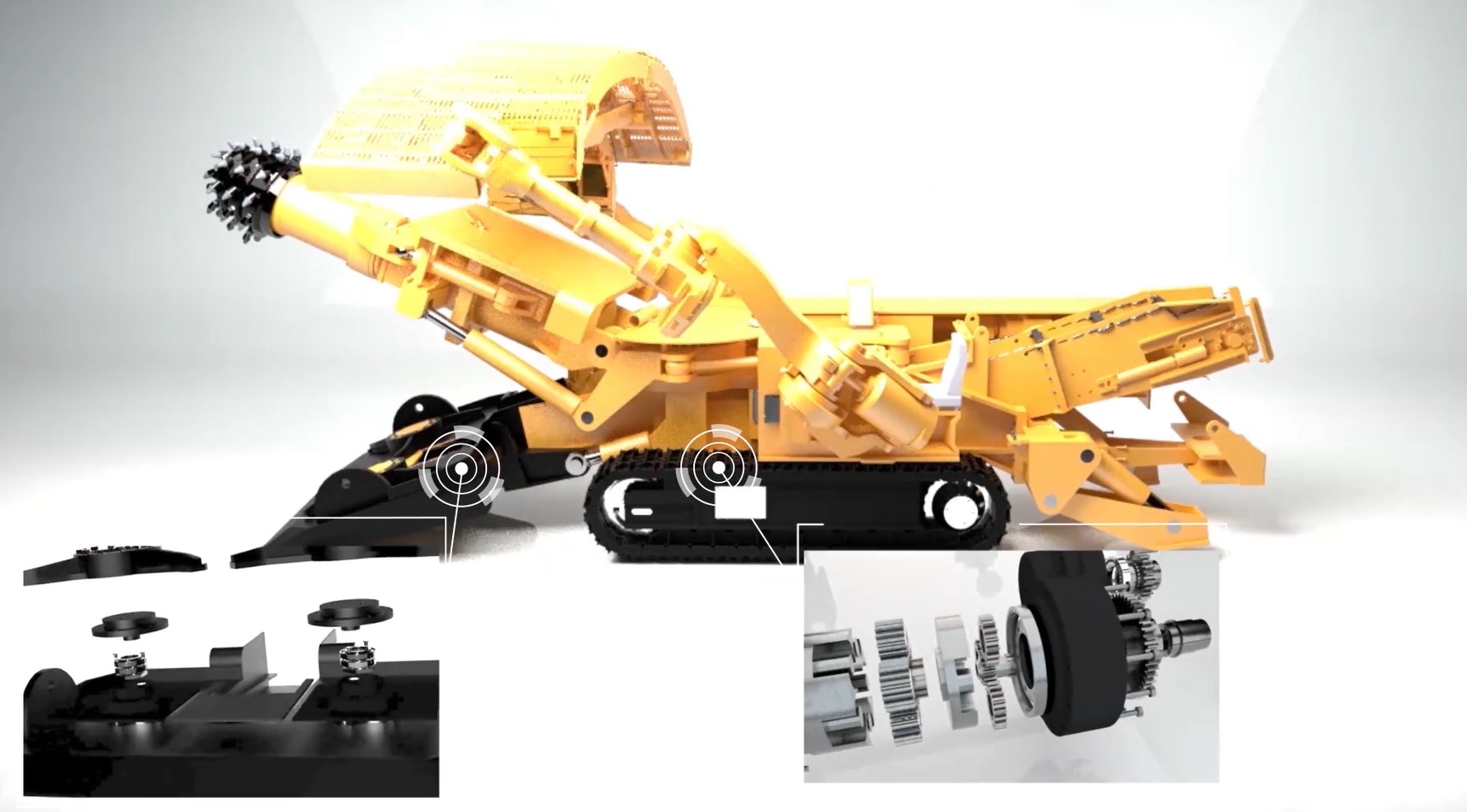
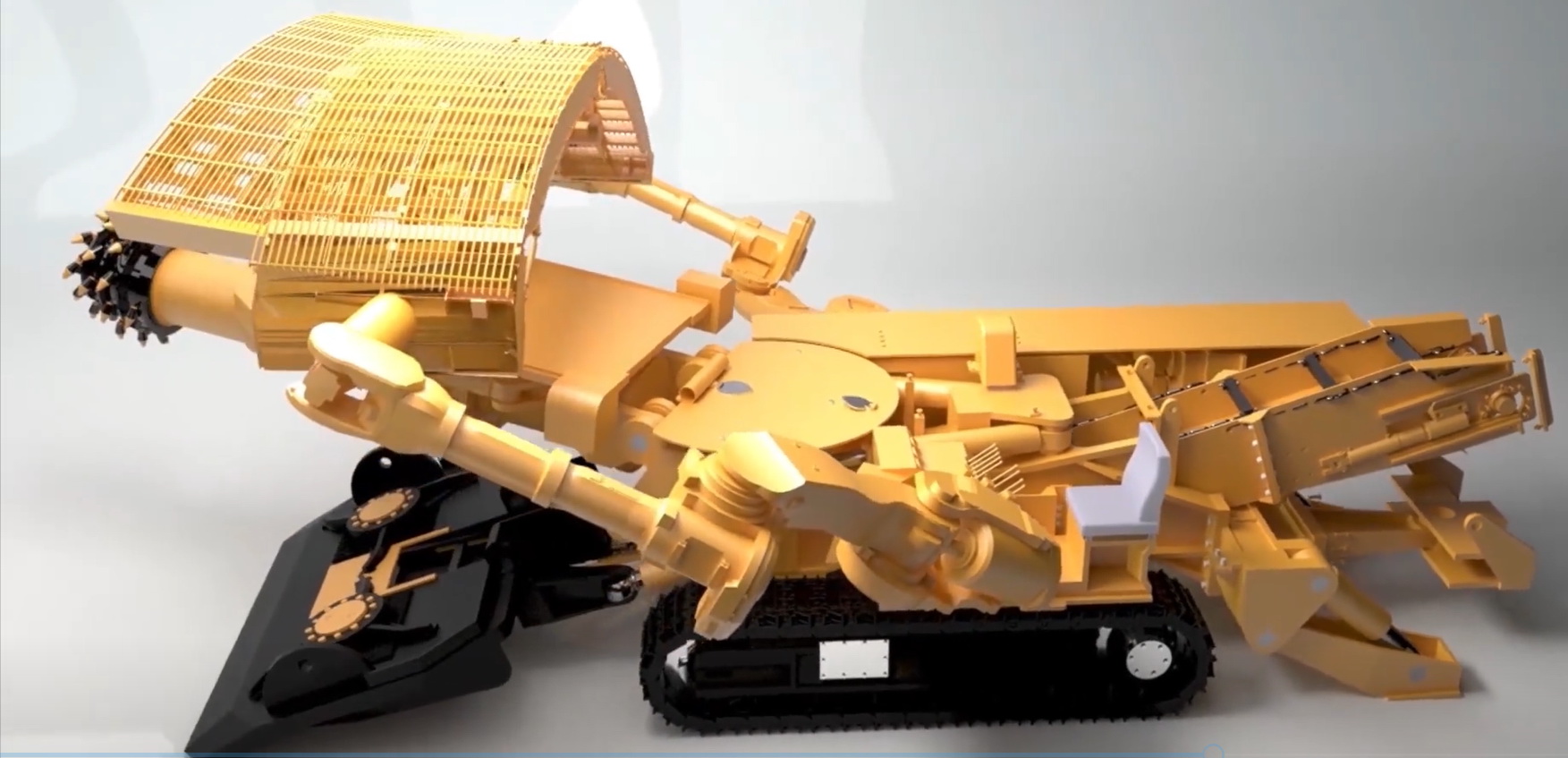
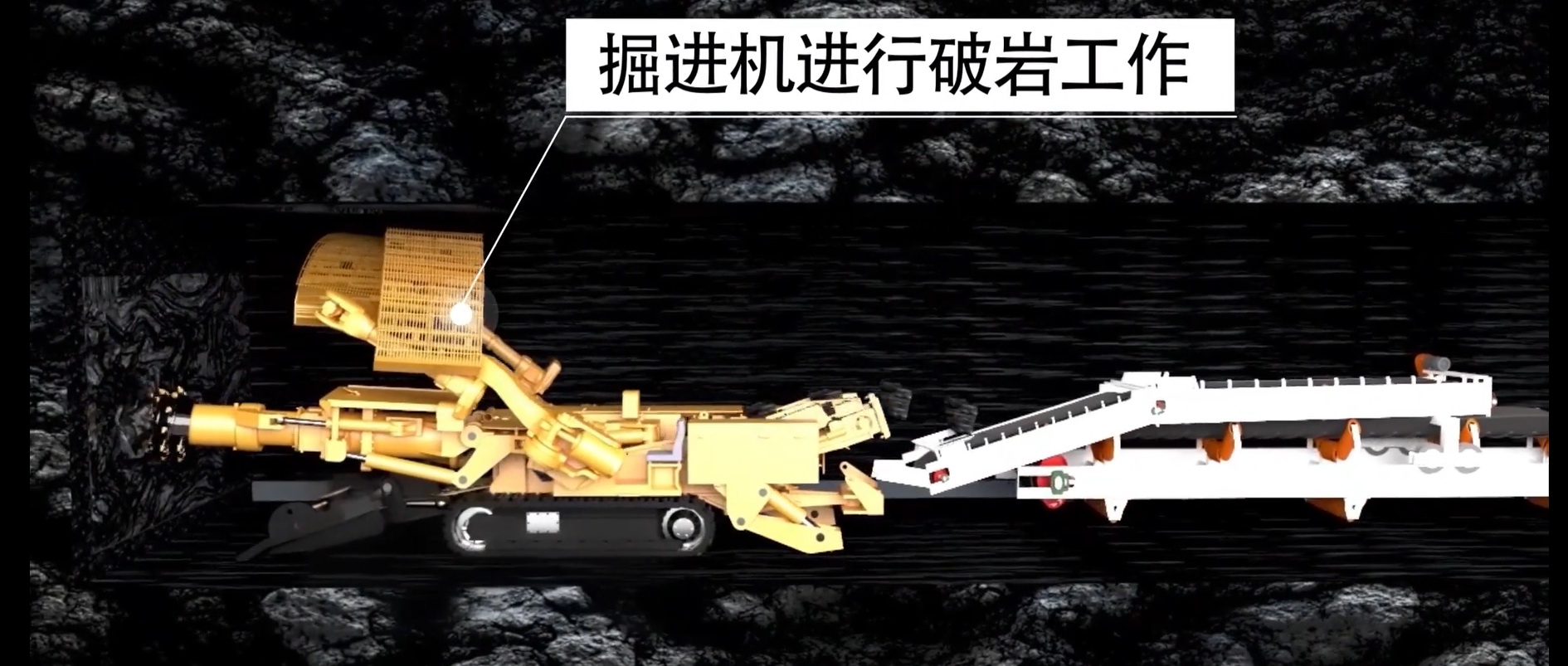
本掘进机由截割部、铲板部、第一运输机、本体部、行走部、临时支护系统、激光探测设备、后支承、液压系统、水系统、润滑系统、电气系统构成。是一款可以能够自主决策、智能控制的掘进机器人,实时监测地底岩层受力变化,探测地底巷道环境,自主生成围岩及机体坐标,自行决策行进路线。其中,临时支护系统的折叠式机械臂简单快捷,灵活高效,可以提高工人安全性,三维探测对掘进设备和围岩进行自动定位,以实现精确掘进,系统中的设备自动完成检测、分析判断、操纵控制,向实现掘进智能化迈进。


