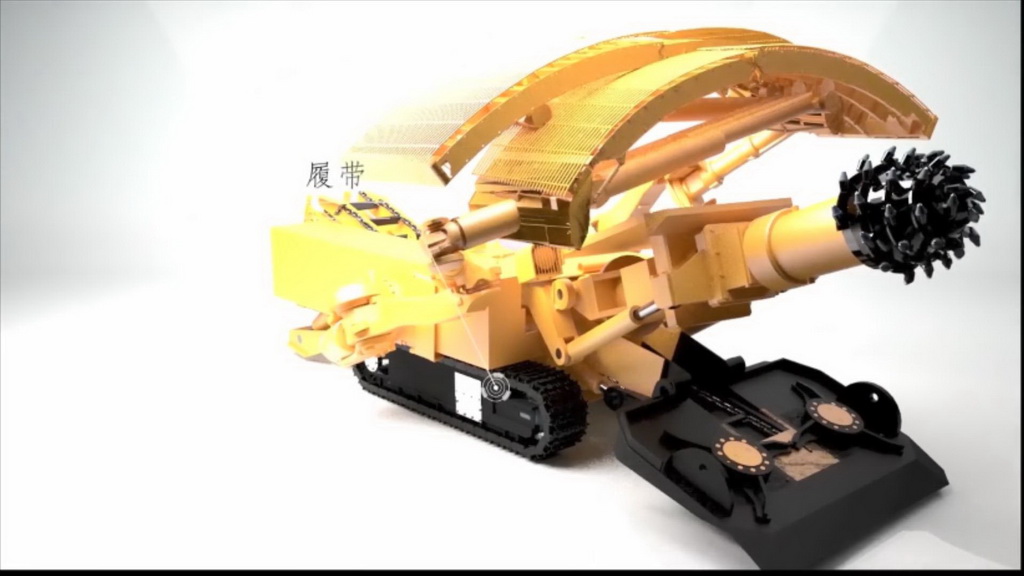
掘进机械主要用于矿山及地下工程中的巷道掘进。同传统的钻爆法相比,采用掘进机作业,具有掘进速度快、巷道成型和稳定性好、超挖量小、瓦斯突出少、利于支护、工程量小、劳动强度第、生产安全等优点。 针对于断面掘进作业时,顶板围岩粉尘塌落,甚至伪顶坍塌对机体以及工作人员造成损伤的问题,我们提出了一种智能化的机械臂临时支护掘进机。 本内容介绍以EBZ160悬臂式掘进机为基础进行模型结构以及功能介绍。在EBZ160悬臂式掘进机的基础上,包括截割机构,行走机构,现有液压系统等。在截割臂上加装可伸缩折叠机械臂以作为临时支护系统;后支撑部加强支撑部结构,加大支腿接地面积及油缸形成;为了匹配机体协调运作,调整扒爪式刮板跨度及一运小溜长度;机身本体部分加装有激光三维扫描探测仪,以实现智能识别工作环境,智能提出掘进数据。 新增的可伸缩折叠式机械臂用于采掘时对工作面上方伪顶进行有效的临时支护,防止截割头震动引起的冒顶事故。活动灵便的臂式支护可以快速有效的为工作人员及机体搭建临时支护,减少机体损伤,保护人员生命安全。掘进机前进时,后侧支护机械臂下移,跟随机身向前推进,及时前探在空顶区搭建临时支护,临时支护系统随掘进机一起推进,可以有效提高临时支护的效率,加快掘进速度,同时大大提高了工作面迎头作业的安全性。 可伸缩折叠式机械臂安装于本体部两侧,修长的机械臂将迎头护网高举于驾驶员头顶,不能干扰掘进机的运动和正常截割作业功能,不能阻挡操作司机的视线,同时不能与原有机载临时支护装置发生干涉。该装置展开时垂直于机载顶板支护机构,实现紧贴煤墙,收回时可完全贴合到顶板支护机构下方,充分保留原机载临时支护装置对掘进机本体的适应性和其自身动作机构的灵活性。 同时装有激光扫描探测仪利用LiDAR(激光探测与测量中的车载MMS)对巷道岩层布置,环境分部进行探测分析。探测得到的点云、影像、位移、时间等数据,经过系统分析计算,自动识别匹配,形成机车的参考坐标,结合机车自带的陀螺经纬仪以纠正位姿。另一方面,扫描仪探测获得的三维点云模型数据入库,利用模拟软件生成三维位移矢量图,形成应力应变场,结合实时监测的煤岩结构和力学性能变化,计算得出掘进参数,智能调控掘进深度,以达到智能监测,智能分析。
一种临时支护智能掘进机及其机械工作演示


作品名称一种临时支护智能掘进机及其机械工作演示
参赛院校山东科技大学
指导老师李学龙、王振浩
团队成员陈杨杨、陈德友、程德鑫、高鑫、韩雪峰
奖项等级二等奖
竞赛年份2021


