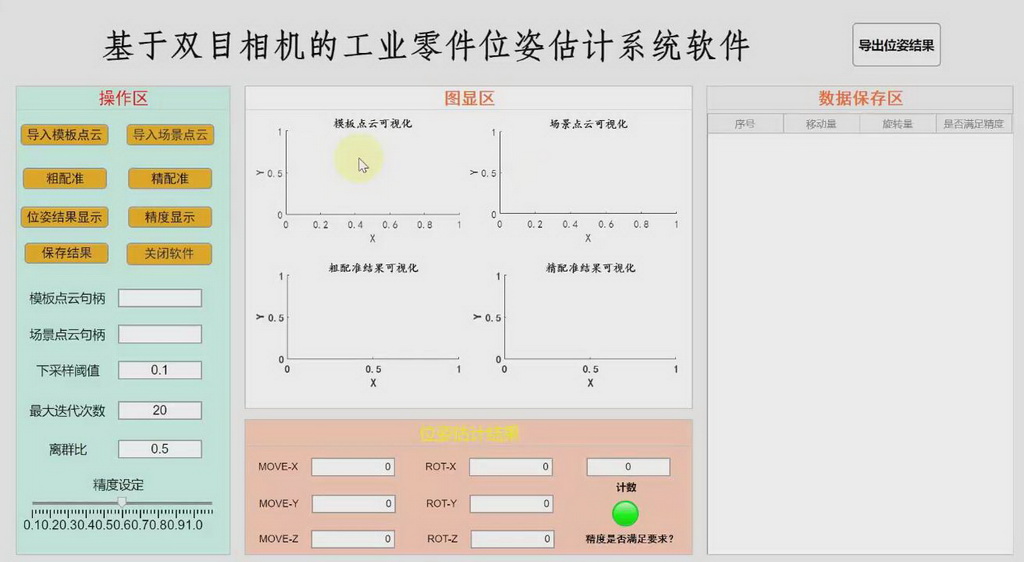
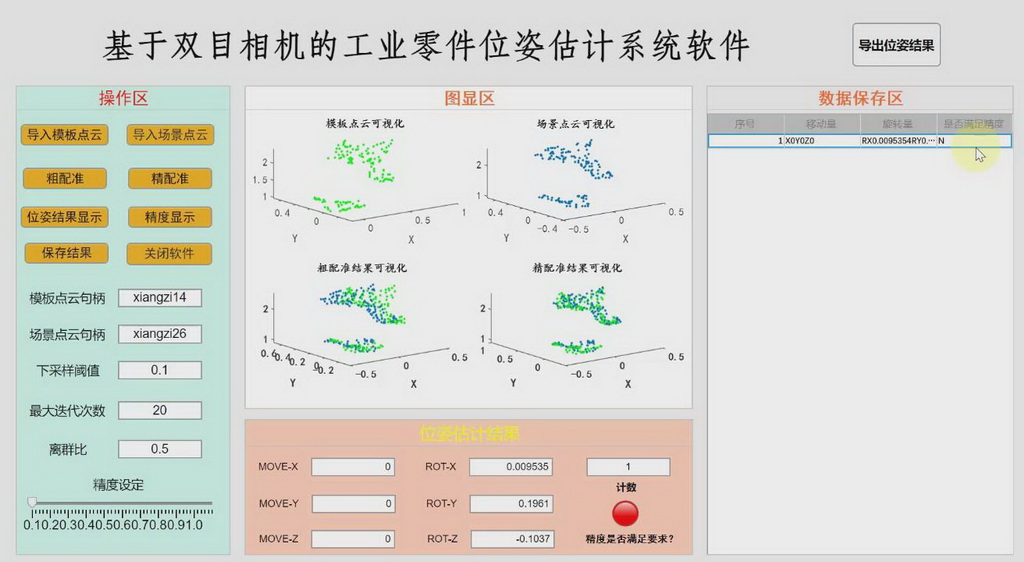
作品名称基于双目相机的工业零件位姿估计系统软件
参赛院校宁夏大学
指导老师朱学军、赖惠鸽
团队成员张龙、周东熠、杨玉坤、率宝奇、刘宇鹏
奖项等级三等奖
竞赛年份2022
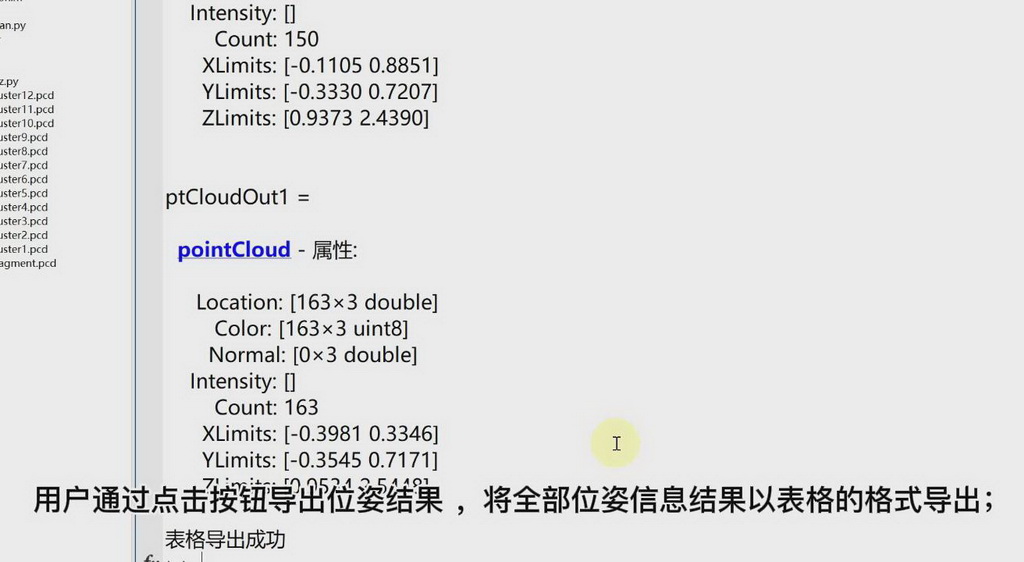
首先,搭建工件点云数据采集平台,利用深度相机对不同工件目标进行点云数据采集。此后,对模板点云进行预处理,包括点云聚类分割、离群点过滤、平台点云剔除以及下采样等过程,由此得到点云数量合理、噪声少的模板点云。接下来,通过特征点提取、特征描述以及点云配准,利用ICP算法实现实际场景工件目标的位姿估计。本位姿估计系统可以准确估计工业零件的位姿,可以指导机器人完成抓取作业。


