


作品名称基于多尺度特征融合的Yolov4高速列车轮对踏面缺陷检测系统
参赛院校湖南工业大学
指导老师刘建华、何静
团队成员胡新亮、李小虎、侯娜
奖项等级二等奖
竞赛年份2021
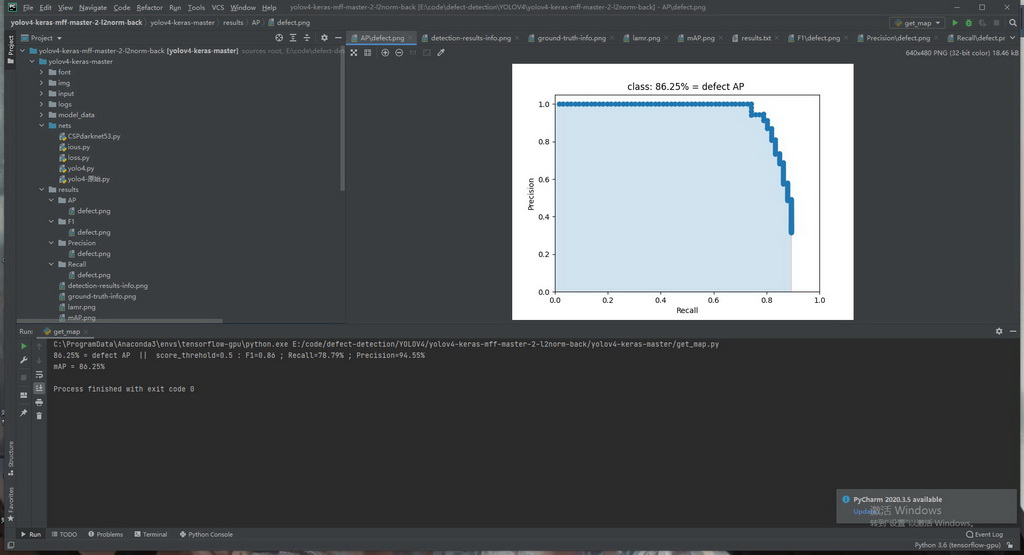
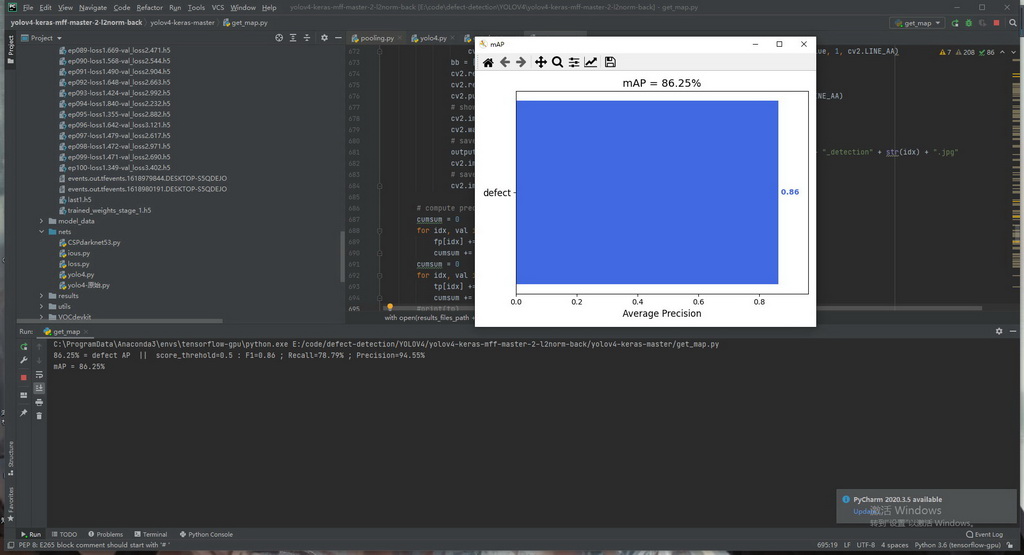
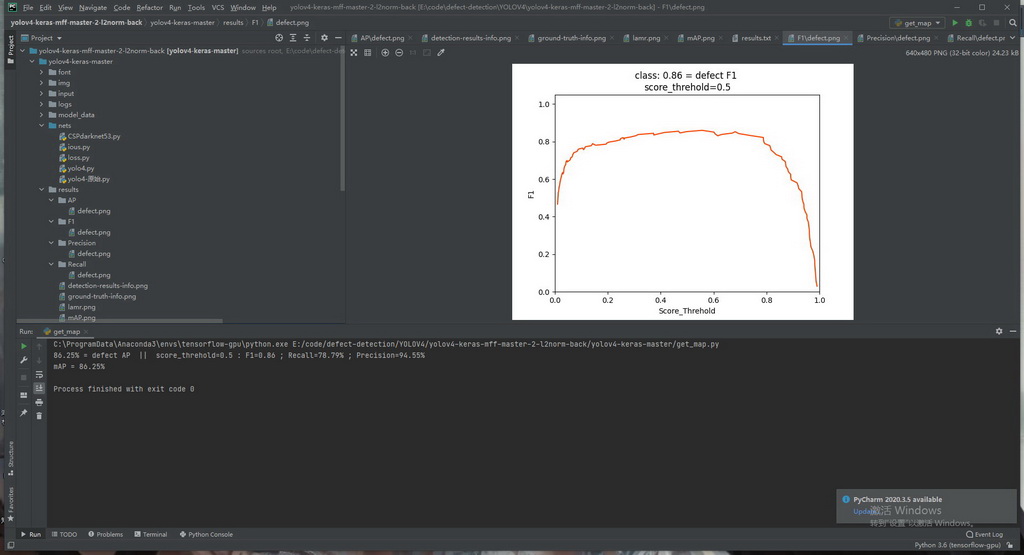
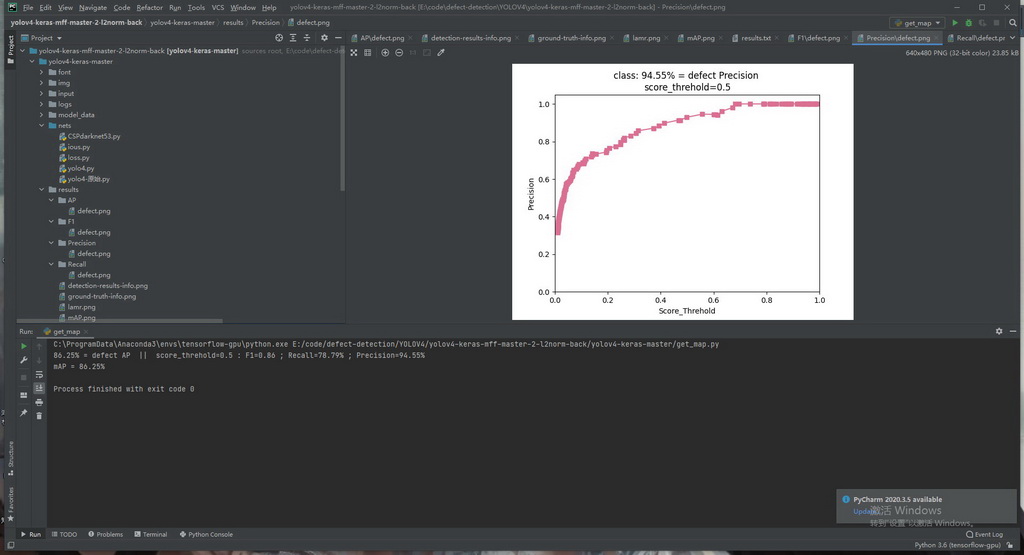
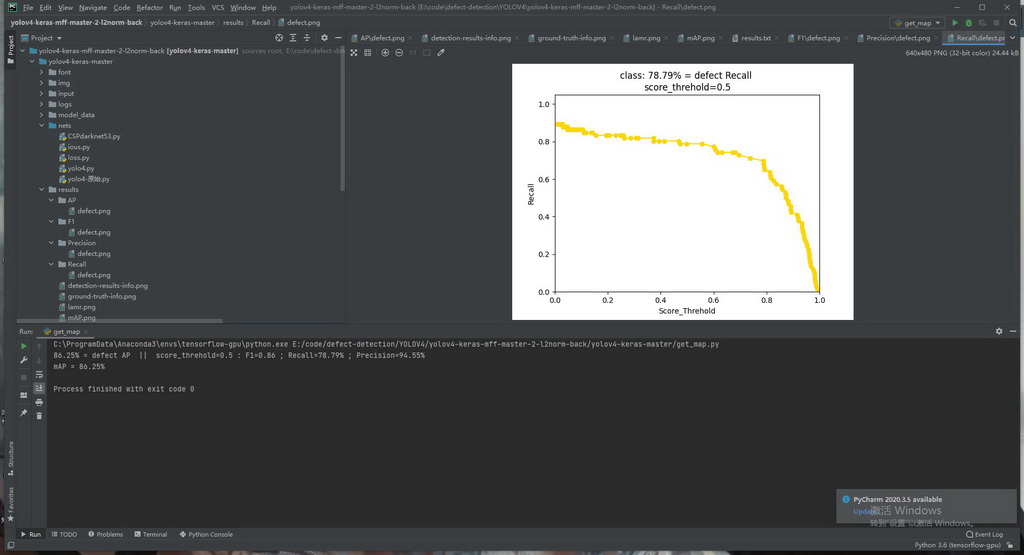
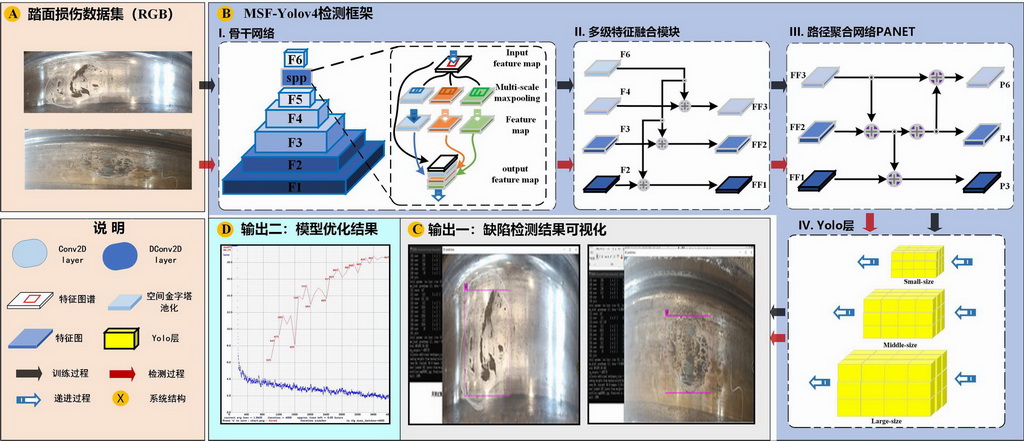
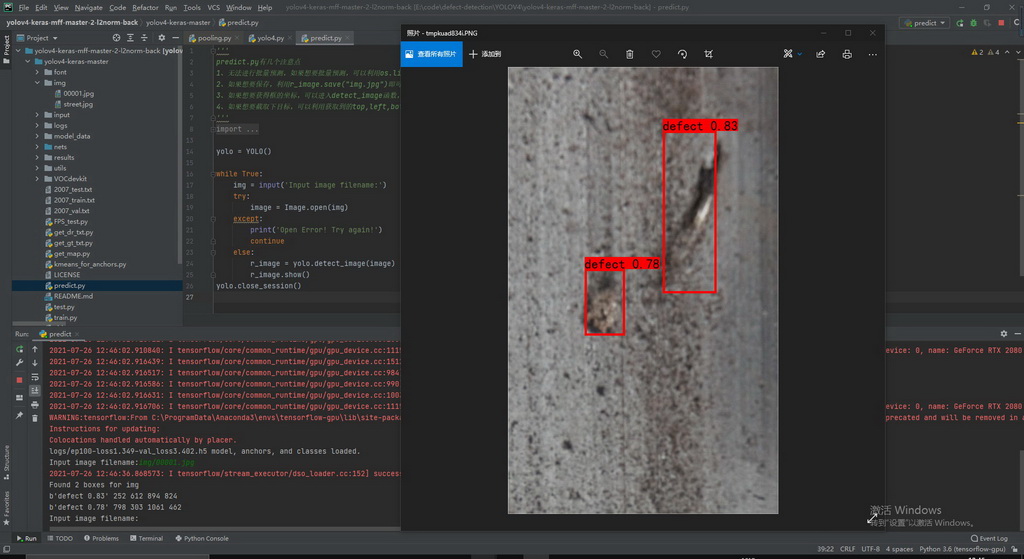
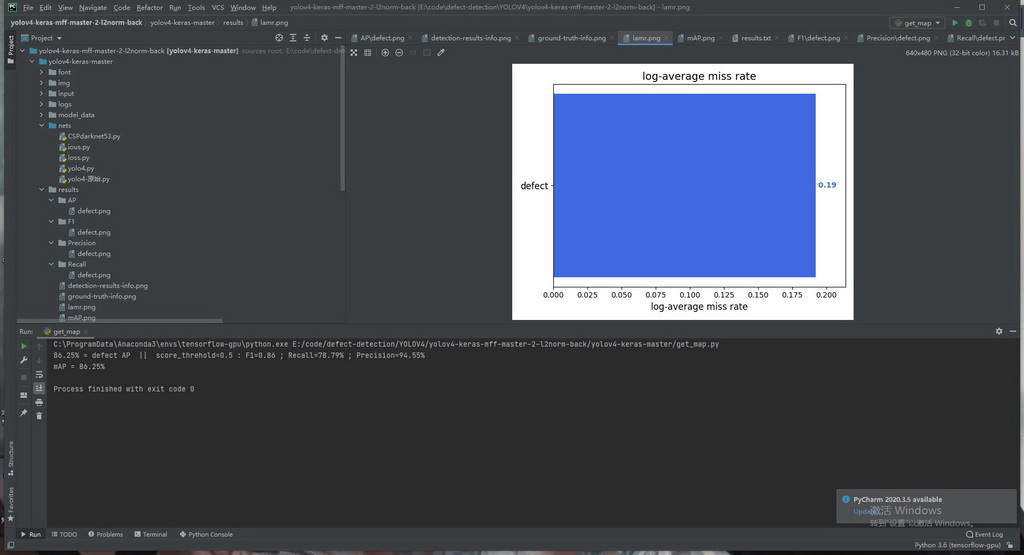
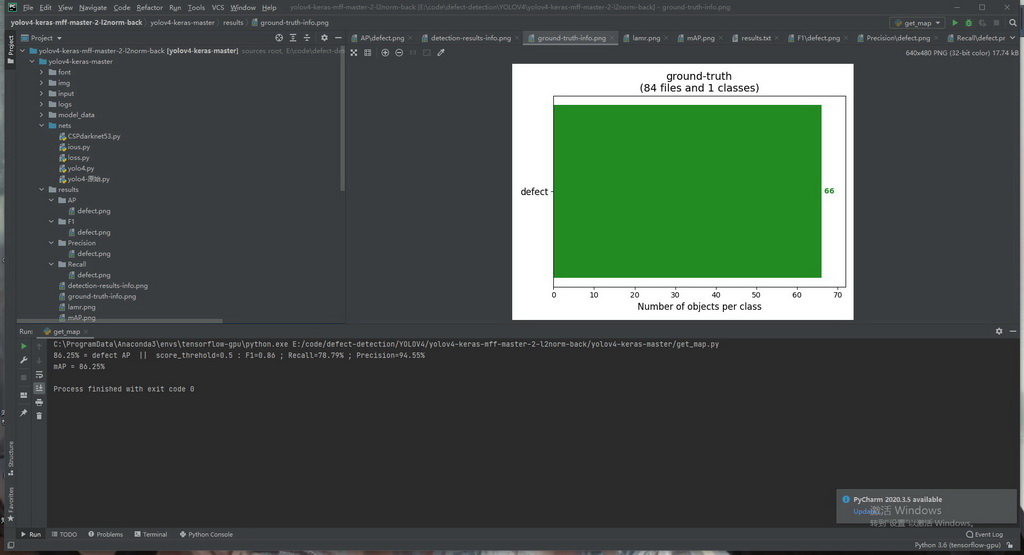
高速列车轮对踏面缺陷检测侧重于缺陷的识别和定位在图像中,在实际工业应用中更注重实时性模型推理环节,导致相关方法难以准确检测轮对踏面缺陷,同时确保实时性能。缺陷检测的实现依赖于包含昂贵的手动注释的特殊检查数据集。本文提出了一种基于Yolov4的多尺度特征融合检测系统,并着眼于实际的工业应用,如高速列车轮对踏面缺陷检测。实现强分类能力,系统继续使用Yolov4骨干网的特征图每个阶段的 Cspdarknet53 和 SPP。然后,提出的多尺度特征融合网络使用 L2归一化对融合前的特征进行标准化,使得轮对踏面的缺陷特征向量在同一数量级。随后,将四个阶段的特征融合到输出三个不同分辨率的融合特征,可以包含更多的语义信息和位置详细信息。基于这些多尺度融合特征,使用路径聚合网络对不同分辨率的特征图进行二次融合。改进的损失函数可以加快网络的收敛速度。最后,轮对胎面缺陷建立检测数据集WT-DET用于训练和评估方法。实验结果表明本文提出的改进的 Yolov4 目标检测算法能够达到检测准确率86.25%,优于目前主流检测算法。单 GPU 检测速度可达到 37.05 fps,实时检测表现。因此具有一定的实际应用价值。


