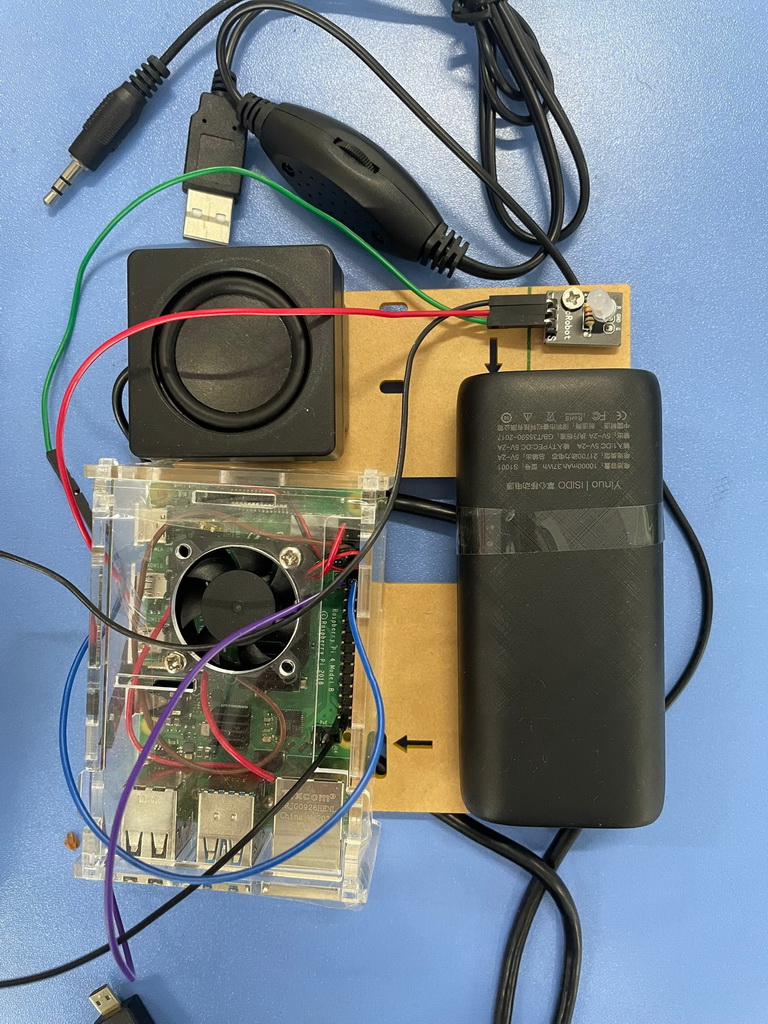
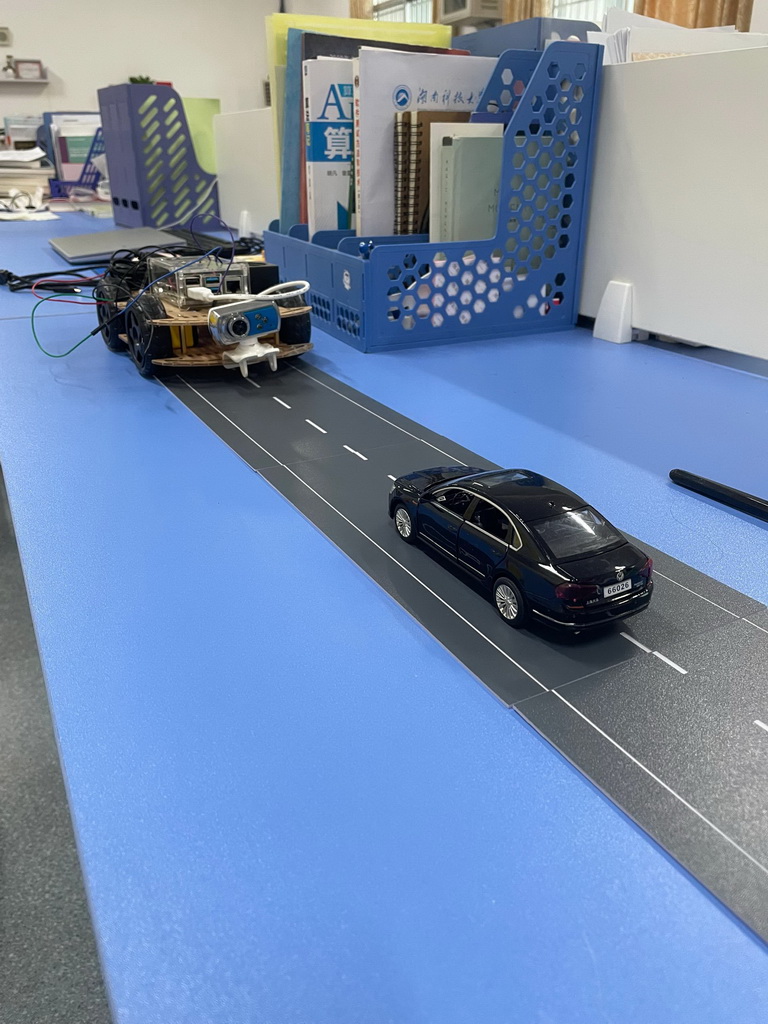
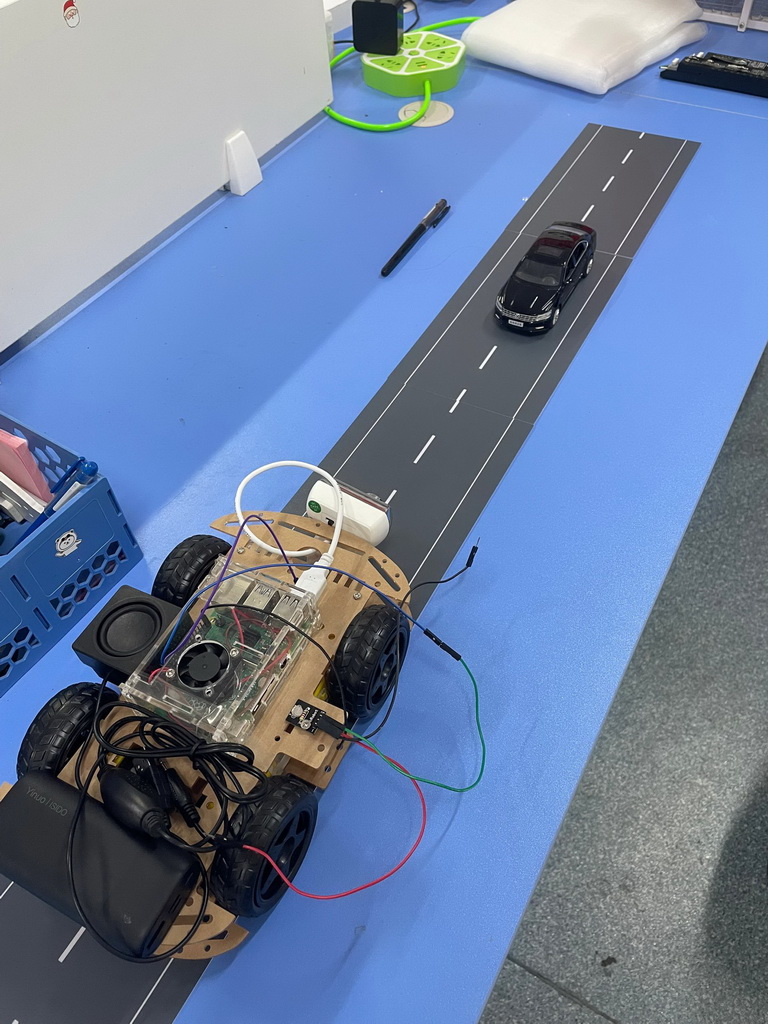
系统通过安装在后视镜上的针孔针孔摄像头获取开车门前车辆后方及斜后方的潜在(机动车和非机动车)状况,同时上传到数据集成中心通过算法算出车速和车距。通过对车速和车距的计算来判断是否达到开启车门的条件。如果没有移动目标靠近,则语音提示可以安全下车;当后方来车距离到达一个很小的阙值或者车速较快时,强制锁上车门,同时语音播报提醒后方有驶来车辆;如果后方的来车距离本车的横向距离较大,则可以通过开启一定角度的车门在保证能够正常下车的同时保障来车没有碰撞危险。如果通过系统判断来车距离较远或者车速较慢,达到开启条件则可以正常开启车门。 使用传统支持向量机、词袋和SIFT特征提取法模型进行运动目标的识别和检测。在树莓派的Trainimages文件夹下有样本图片训练集,有车和无车的各为一半作为正负样本。利用词袋模型训练器创建SIFT对象用于关键点提和关键点描述符的提取。使用KTreeIndex匹配算法对正负样本进行进行最近邻搜索。然后创建BOW训练器,合并处理好的特征数据,通过聚类创建视觉词汇。接着进行k-means聚类,返回词汇字典 也就是聚类中心。最后初始化bow提取器(设置词汇字典),用于提取每一张图像的BOW特征描述,并创建两个数组,分别对应训练数据和标签,并用BOWImgDescriptorExtractor产生的描述符进行填充。1.0表示有车辆,-1.0表示没有车辆。创建SVM对象使用训练数据和标签进行训练。使用相似三角形进行测距时,通过模糊、二值化,形态学操作等对图片进行处理。接着使用opencv轮廓检测进行轮廓识别。最后计算中点之间的欧氏距离,从而得到物体在图片中的像素高度和宽度,为相似三角形测距做准备。进行汽车的检测识别后,在有车的情况下使用相似三角形算法进行了距离的计算。在计算距离的时候,我们利用抓取图片阶段的两张图片可以分别计算出驶来车辆在两张图片中(也就对应了汽车在两个时刻的位置)与本车的距离,通过在拍照阶段设置好的0.5S间隔作为△t计算瞬时速度。瞬时速度是表示物体在某一时刻或经过某一位置时的速度,该时刻相邻的无限短时间内的位移与通过这段位移所用时间的比值v=△x╱△t。当△t足够小的时候,利用极限思想可以把0.5s间隔内的平均速度作为瞬时速度,达到对速度的监测,实现预警功能。采用帧间差法对相邻的两帧图像做差分运算,并取差分运算的绝对值构成移动物体,提高准确度。
基于机器视觉的开门杀预警系统


作品名称基于机器视觉的开门杀预警系统
参赛院校湖南科技大学
指导老师王晓亮
团队成员刘晨阳、何顺梅、唐瀛、赖冰、王晶
奖项等级三等奖
竞赛年份2021


