随着近几十年来技术创新速度不断加快,工业制造、军事领域、智能家居、民政救灾等各个领域不断产生新的需求,各种机器人被发明出来服务于人们的各方各面,而在不同功能的机器人问世并实际应用以后,人们更趋向于追求皆具适应性、灵活性、高效节能等多种特点共存的机器人,而当下常见的机器人大多性能单一,适应性偏弱,劣势明显。 常见的机器人根据运动方式的不同可分为轮式机器人,足式机器人,履带机器人。轮式机器人适宜平地运动,运动平稳,速度快,效率较高,但对使用环境要求较高,适应性不强;足式机器人可适应多种复杂地形,具有越障、爬楼梯、过台阶等能力,适应性强,但在平稳地形的运动中又存在稳定性差,速度慢,效率低等问题;履带机器人适应能力较强,平地运动也相对平稳,但相对于轮式机器人而言运动速度偏慢,工作效率较低。 公开号为CN113815743A的专利申请公布了一种轮足臂复合六足机器人,此机器人结合了轮式和足式的特点,使其皆具二者的优点,但其大大增加了电机数量,使其成本大增,同时由于轮子和电机都安装在机器人腿部,使得腿部体积和重量增加,极大的增大了转动腿部所需力矩,进而使其在机动性上受到阻碍,或是使用工作力矩更大的舵机而由此又增加了机器人的成本。 常见的足式机器人有二足,四足以及六足。其中二足机器人对于平衡控制等要求较高,六足机器人运动的稳定性最佳,通过性能最好,并且如果用于人机交互则其动作更加多元化,因此具有广泛的应用前景。 我们着力于面向 G 端产品的技术的开发和生产制造工艺的完善,深耕智能巡检,进一步完善机械结构、步态识别、算法等核心技术。同时,继续致力于新技术的开发,通过大量用户数据进行深度学习并以此完善情感交互、智能适应领域,增强产品的可用性和易用性,争取完成针对巡检场景下不同细分领域业务的核心技术自主化,形成较为成熟的技术能力。此外,跟随物联网普及的趋势,与多样化产品供应商合作,如家用智能电器、智能穿戴产品为其提供技术接口。针对机器人教育开发领域,打造技术二次开发接口平台与大数据平台,并辅以整合技术解决方案打包出售的模式,构建完整的生态体系。
巡觅——场地巡检六足轮足式AI机器人

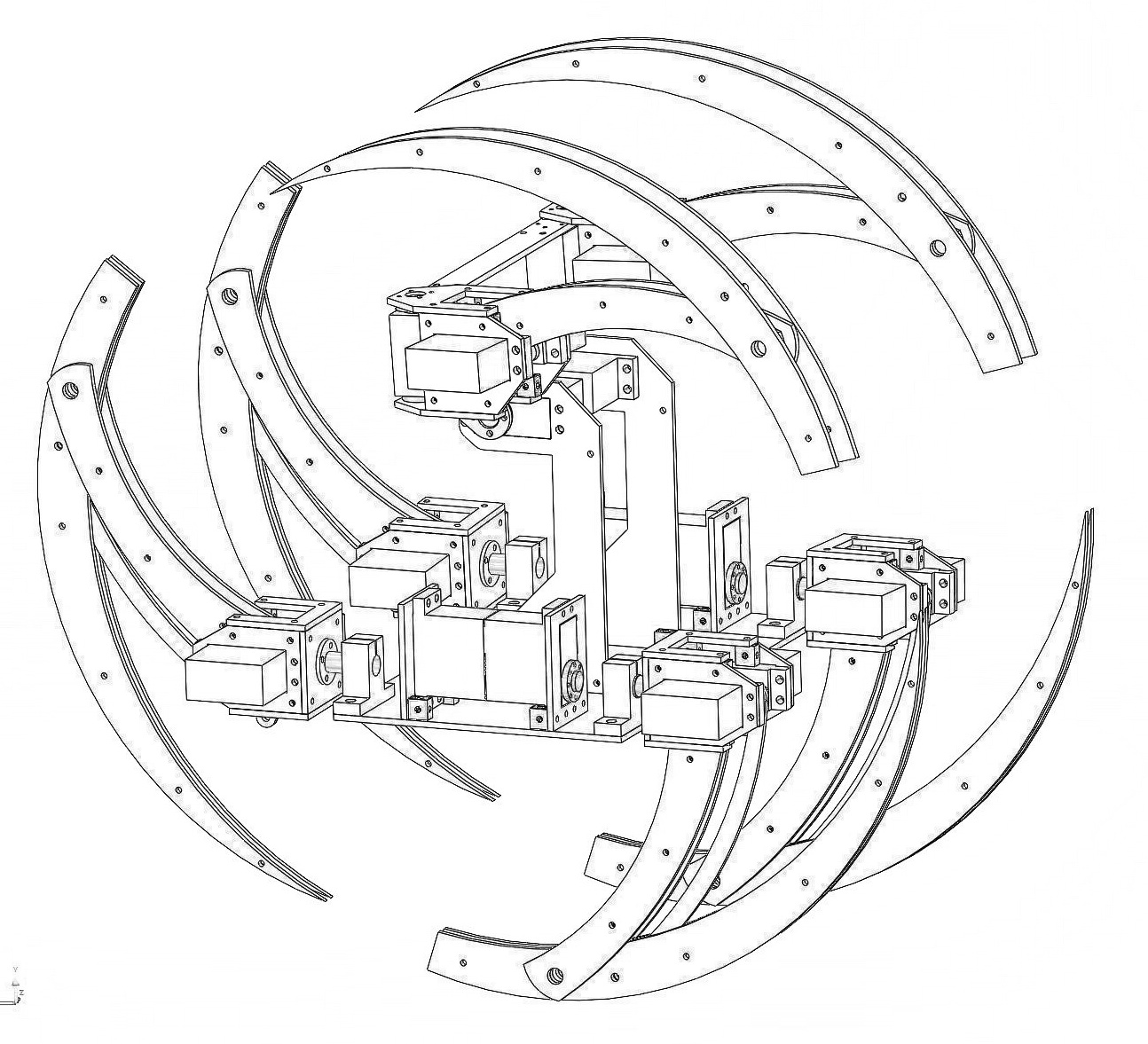
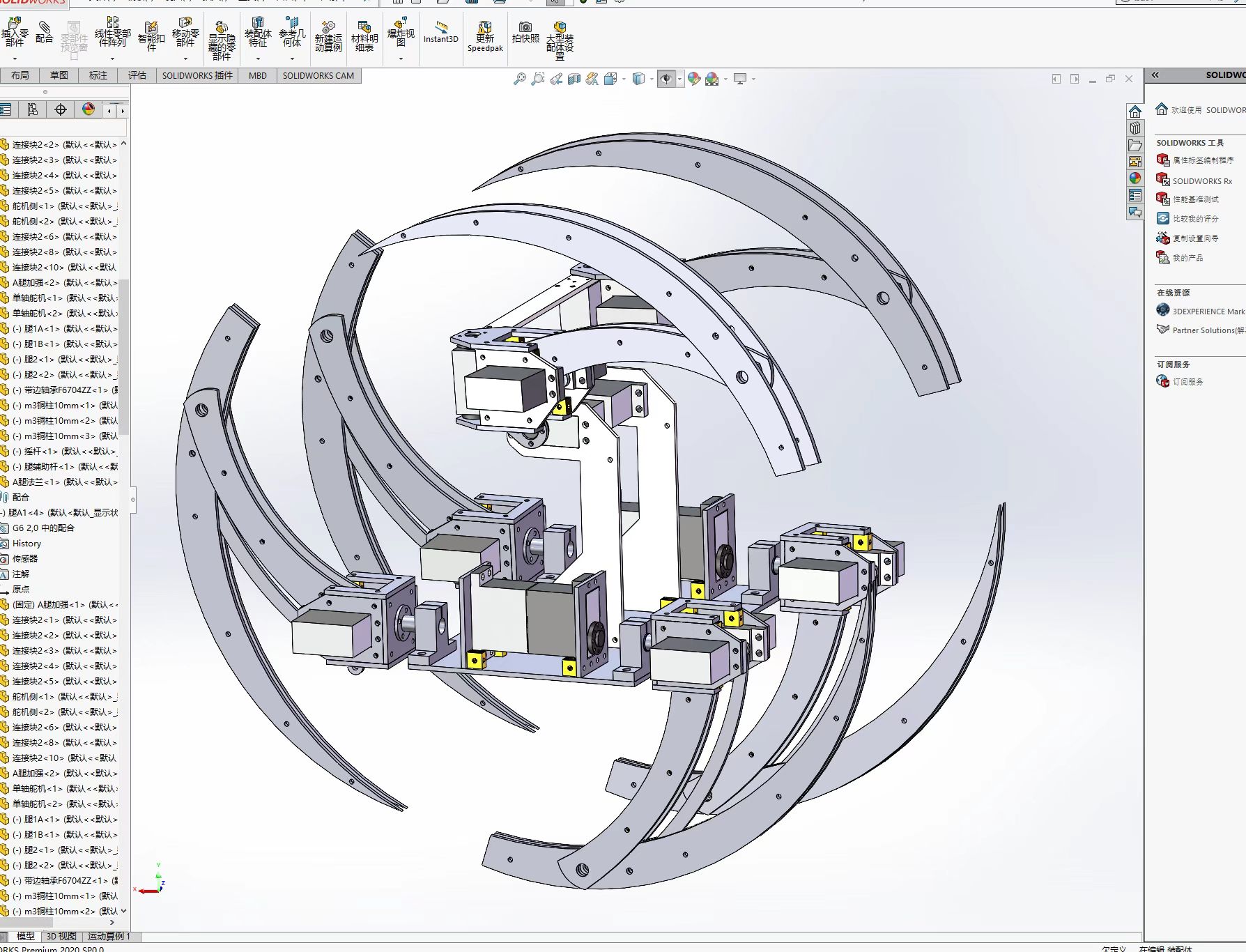
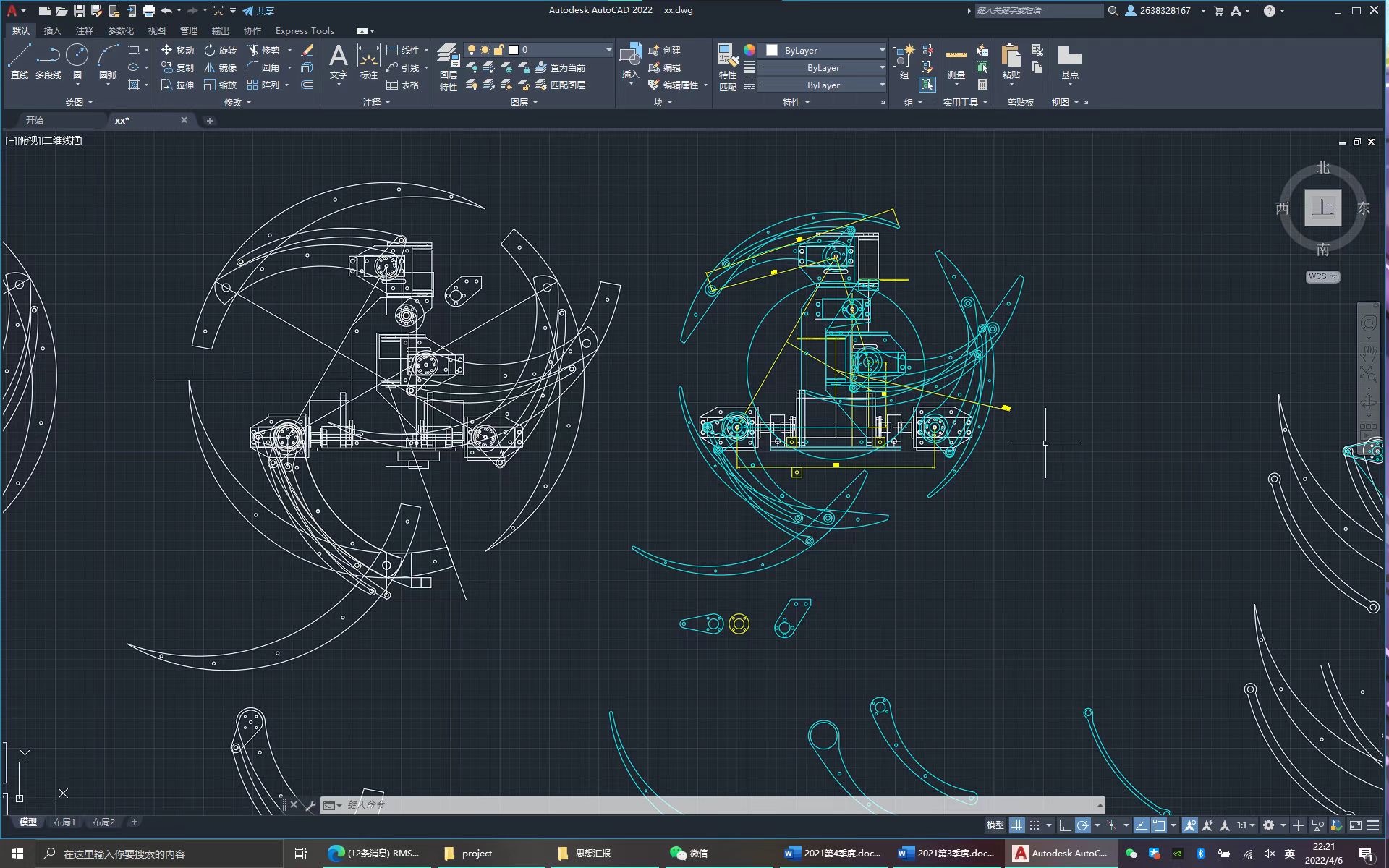
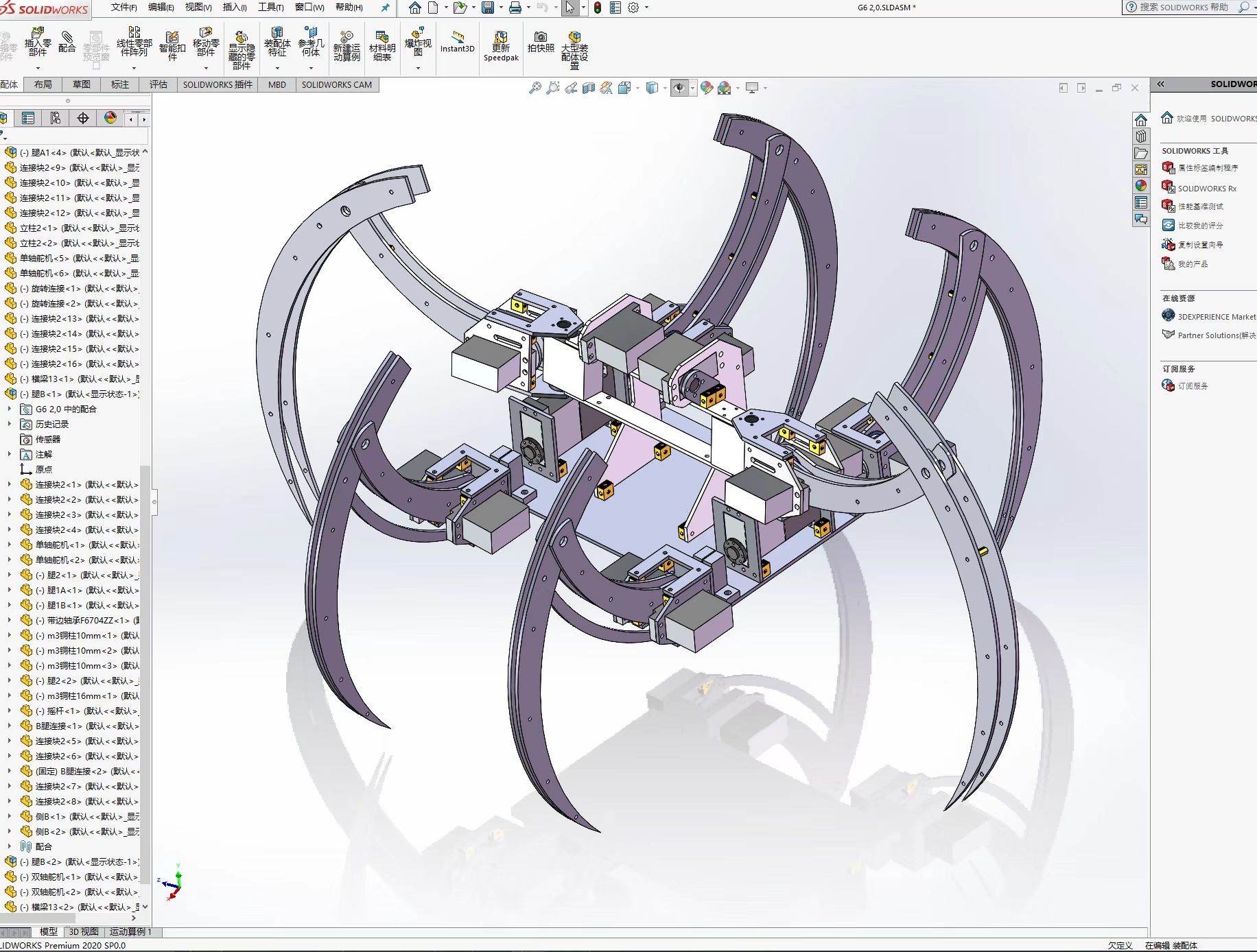
作品名称巡觅——场地巡检六足轮足式AI机器人
参赛院校浙江大学
团队成员马驰程、陆轩婷、杨宗明、张曦、杨常旭
奖项等级一等奖
竞赛年份2022


