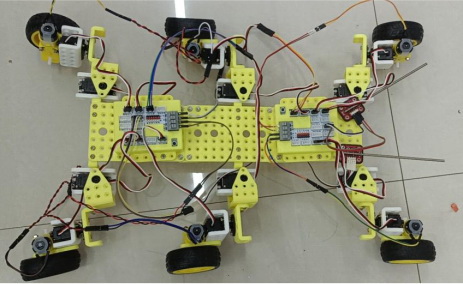
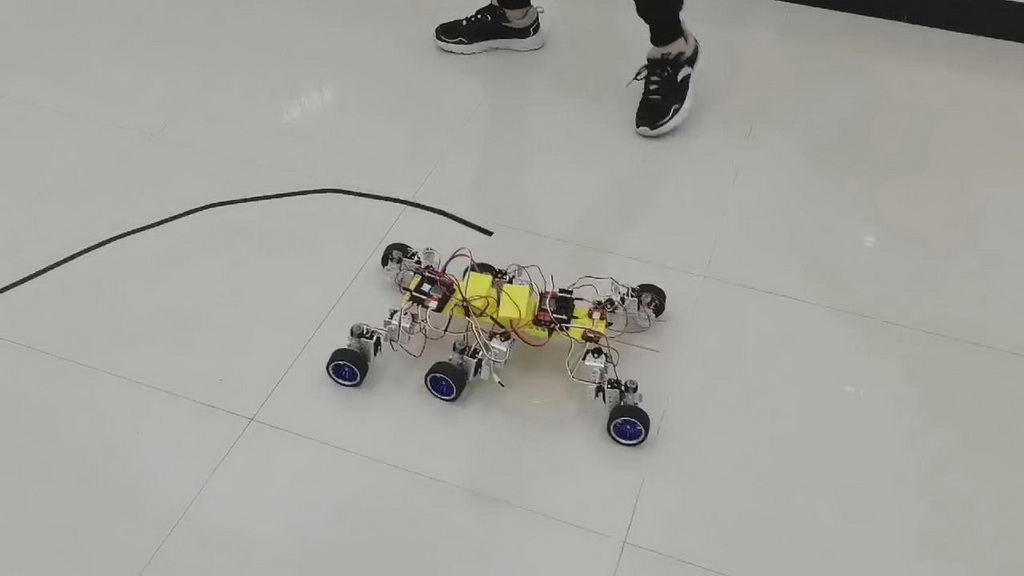
作品名称多足轮步式机器人
参赛院校沈阳航空航天大学
指导老师郑耀辉
团队成员徐石
奖项等级三等奖
竞赛年份2022
六足轮步式机器人的运动学规划是轮步式是六足轮步式机器人研究的重要问题,其包括了步态行走规划,和轮式移动问题设计问题。而步态的规划更是其中的重点,在自然界中六足昆虫在行走时, 一般采取像人一样将足分为两组进行运动,相当于人的左右腿,交替迈腿前进。将身体一侧的前足、后足及另一侧的中足为一组, 剩下的做为一组。在行进的过程中, 将一组作为支撑组,使机器人的重心保持在支持组中,而一组则作为运动组, 在前进过程中,每向前走一步运动组就会变为支撑组, 支撑组同时也会变为运动组, 这样循环往复, 就可以实现六足轮步式机器人的步态行走。 当六足轮步式机器人采用轮式运动时,其上的六个足保持与地面垂直,控制器驱动电机运动,从而实现六足轮步式机器人的轮式运动。 轮步混足的优点是可以根据地面的特点做出模式的转换。它有两种模式:一种是在路况复杂的地面,采用六足行走,其多达三对的足肢使其具有极佳的地形适应能力,当一只或两只足肢遇到踏空或是阻碍时依然能正常移动。另一种是在路况平坦的地面上,采用六个轮子进行移动,其上的六个足保持与地面垂直,控制器驱动电机运动,从而实现六足轮步式机器人的轮式运动首先也是六个腿先撑住主体,再通过调整步态慢慢往上收起,使六个轮子渐渐与地面接触,待轮子与地面接触后。六只腿按照原来设定好的程序,收缩于上面,此时六个足处于收起状态,靠六个轮子进行移动,正如小车一样,使其能在平坦的路面上快速移动。 正因为轮步式六足机器人有这样的两种模式,使其更具有灵活和快速驱动的特点,更能适应路面的情况,从而对探索任务的完成更具有高效性。


