





作品名称无界行者—海胆精灵
参赛院校大连海事大学
指导老师耿新鹏
团队成员廖世豪、周品霖、王奕为、张嘉彤、刘国臻
奖项等级国赛一等奖
竞赛年份2023
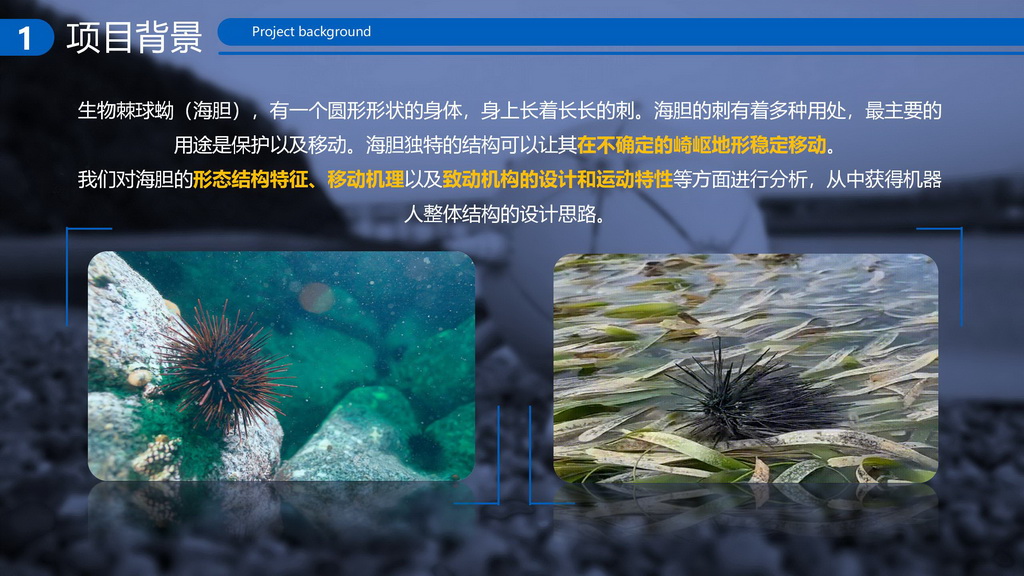
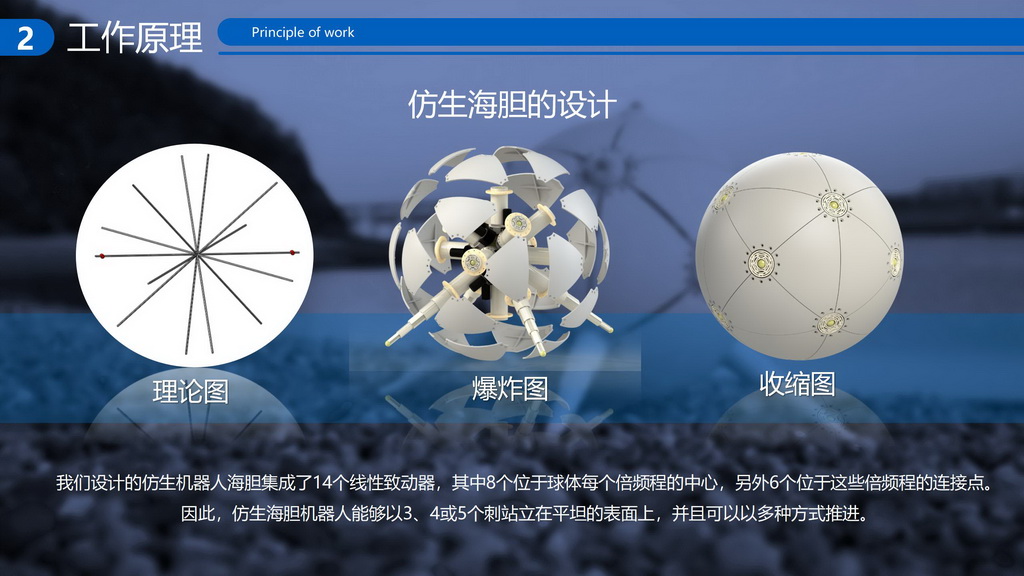
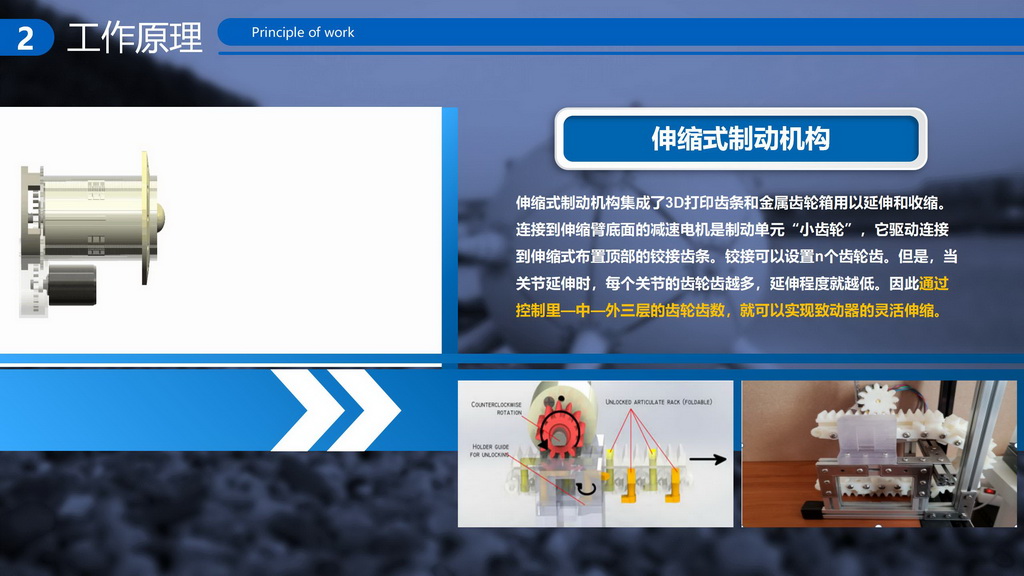
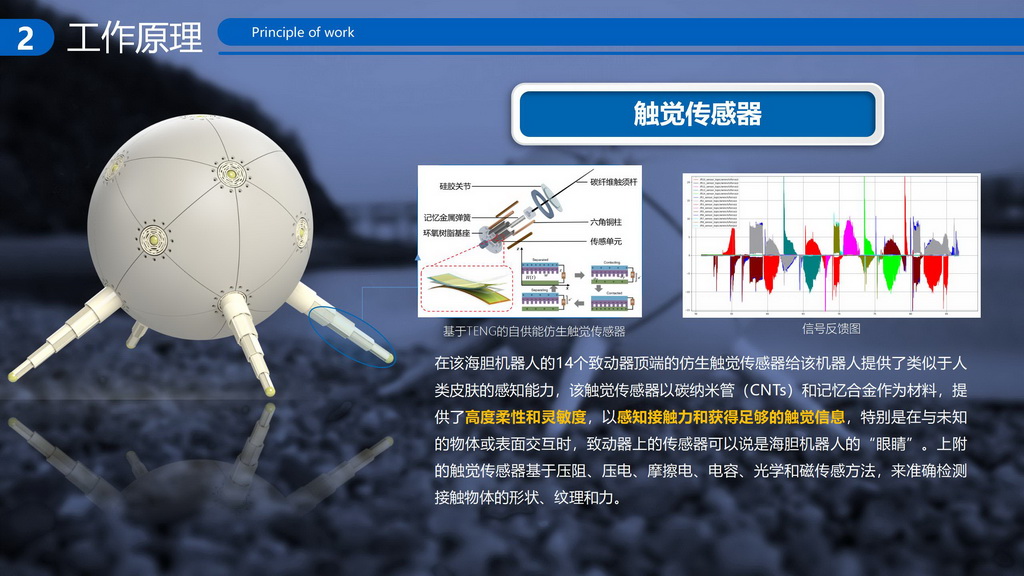
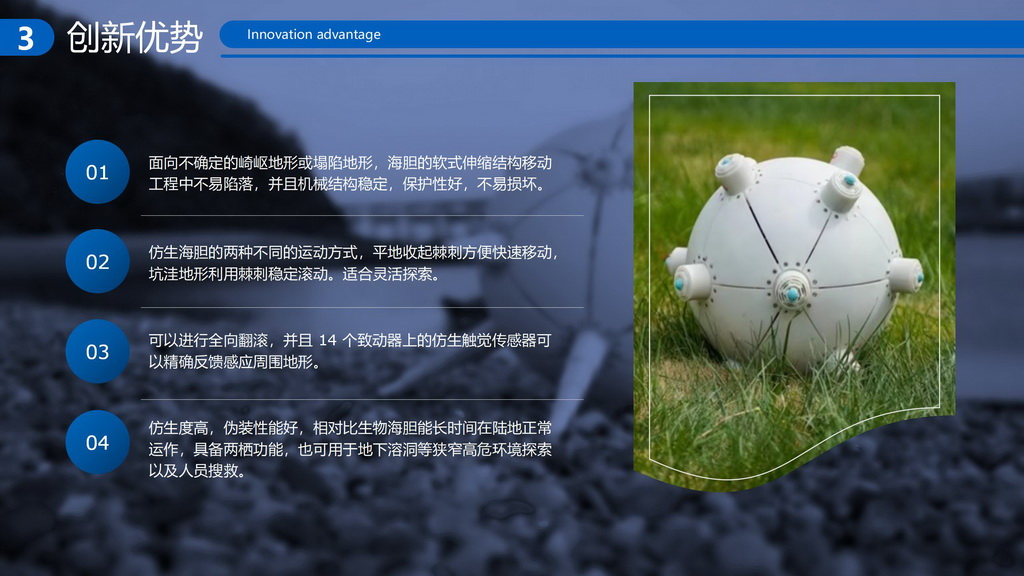
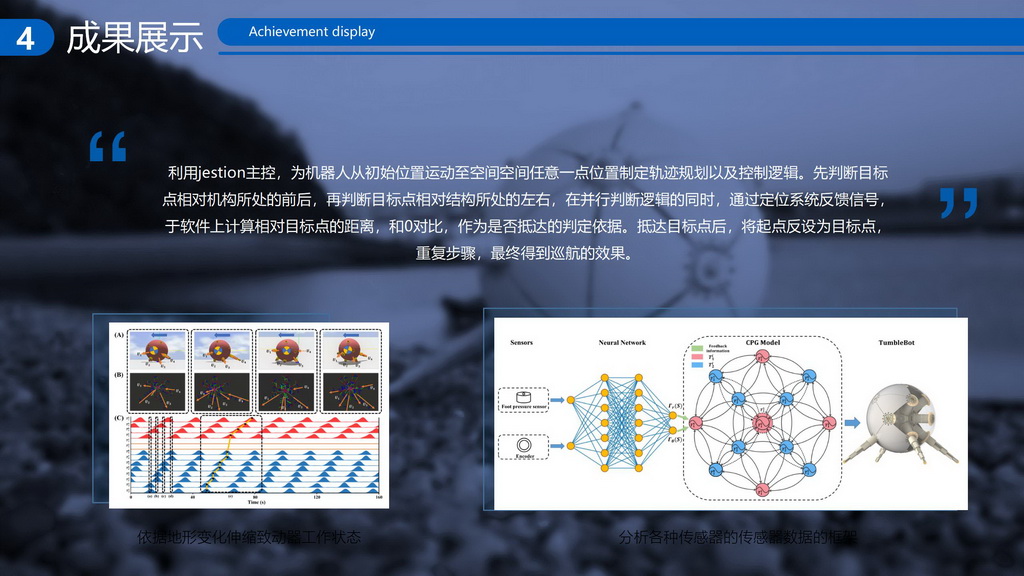
市场上急需一种能够探索危险环境的球形勘测机器人,可以全向翻转,运动平稳,能灵活探索人们难以进入或危险的地方;并且这种新型机器人能够克服已有的球形机器人存在的问题。这些机器人还需要能够将其部件隐藏在自身内部,从而保护其完整性。 得益于由海胆得到的灵感,我们提出了一种基于可伸缩脊柱状操纵器的扩展,该操纵器均匀分布在基于摆锤的球形机器人的表面上。通过形态仿生学设计将海胆外形与伸缩致动机构相结合,使机器人具备全平面的移动能力,并且具有一定的越障能力,在单自由度驱动的前提下仍然具备较为出色的综合移动性能,仿生度高,伪装性能好。相对比生物海胆能长时间在陆地正常运作,具备两栖功能,也可用于地下溶洞等狭窄高危环境探索以及人员搜救,具备良好的经济性和广泛适用性。


