1、作品名称
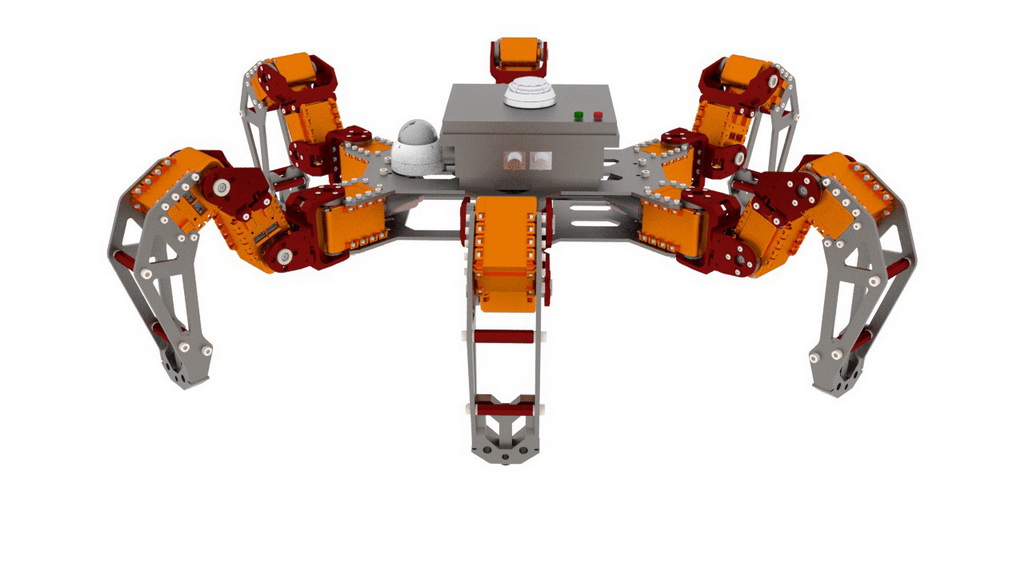
复杂地形救援机器人
2、作品分类
智能科技产品设计
3、作品描述
1、机械结构设计 其运动结构主要由六条仿照多足昆虫的腿部结构设计的机械腿构成,根据多足昆虫腿部三个自由度结构,设计出腰关节、髋关节、膝关节三个关节;并采用三个舵机模仿三个关节的动作。由于采用六足式的运动方式,18个关节,对应 18 个运动舵机进行控制。为了使得搭载到机器人上的传感器更加稳固,实现更好的检测效果,本文在六爪机器人的头部上设置用于装载摄像头的云台装置,可根据地面站的指令进行转动;且在底部还设计用于安装检测传感器的固定支架。为了实现更好的运动控制效果,在机器人机身的前端安置两个超声波避障传感器,并为之设计固定支架。 2、产品控制系统 六足巡检机器人的控制系统主要由六足机器人运动以及云台系统、无线通讯系统、摄像监控系统、气体检测系统、避障系统构成。 (1)六足机器人运动以及云台系统 本系统采用 stm32f103 作为控制器,通过 UART 通讯接口与 24 路的舵机控制板进行连接,控制机器人上的 18个运动舵机以及 1 个云台舵机。舵机控制板上有 24 路的舵机控制信号。stm32f103 控制器通过发送串口指令,控制 18 个舵机转动的特定的角度,实现六足机器人的前后左右运动、转动等基本运动。通过发送串口指令,控制云台电机,从而带动摄像头进行转动,实现多角度的拍摄废墟环境。 (2)无线通讯系统 六足巡检机器人具有自动控制和手动控制两种模式,模式的切换通过通讯指令来实现,手动控制同样需要依赖可靠的通讯方式。特别在废墟环境下,障碍遮挡物较多,距离较远,通讯信号差,我们采用的 433 数传技术实现对机器人无线控制能一定程度上的抵抗这些不足。433 数传模块一般是成对使用,stm32f103 控制器的 UART 接口与一个 433 数传模块进行连接,另一个 433 数传模块通过 USB接口与地面站相连接,如此就可以实现稳定的机器人的手动控制,以及机器人回传的数据信息。 (3)摄像监控系统 本系统采用 10 倍变焦的摄像头,能更好的适应复杂的环境变化;通过 5.8G 图传模块与地面站显示器进行无线的图像传输。类似的,5.8G 图传模块也是成对使用,一个发送、一个接收。5.8G 发送子模块搭载在六足巡检机器人上,通过 micro usb 接口与 10 倍变焦的摄像头的视频输出口相互连接;5.8G 图传接收子模块设置在地面站上,通过视频线与显示器相连接,通过显示器可以直接看到摄像头所拍摄到的画面,如此便构成了机器人的摄像监控系统。 (4)气体检测系统 该六足巡检机器人上搭载气体检测装置,该装置能够将某种特定气体的体积分数转换为对应的电信号。该装置上搭载有二氧化碳传感器,丙酮传感器,氨传感器,异戊二烯传感器和检测人体皮肤释放出的化学物质的传感器。stm32f103 控制器通过捕获各个传感器输出的电信号,将气体的成分、浓度等信息进行计算并回传到地面站,并采用定位跟踪算法,对气体进行跟踪。 (5)避障系统避障系统 通过测量运动方向上有无障碍物,若有的话则测量与障碍物的距离,到达一定的安全距离之后机器人自动停止运动,进入手动控制模式,并将信号反馈给地面站,等待工作人员进行下一步的操作,如后退或绕开障碍物,实现避障效果。通过 stm32f103 控制器的 UART 通讯接口与超声波测距模块相连接,发送指令获取模块测得的与障碍物的距离,该数据为十六进制,且以毫米为单位,需要进行转换为十进制的数值。
4、创意来源
电子计算机的出现,在科学技术上引起了一场深刻的革命。经过半个世纪的发展,它已广泛应用于工业、农业、国防、能源、商业、金融、交通、文化教育、卫生、军事等各个领域。对国民经济的发展,及信息化的进程起着积极的作用。新中国成立以来,我国已建立起完整的现代工业体系,几乎能生产世界上所有同类的工业产品,特别是中高端同类产品。中国500余种主要工业产品中有220多种产量位居世界第一,建成了全球最大的4G网络,航天、高铁、核电、通信设备、多轴精密重型机床等方面的产品已具备全球竞争力。正是制造业,特别是先进制造业的发展,创造了中国的经济增长奇迹,也正是齐整完备和较为先进的现代制造业,支撑起了中国的经济体系。现在,全球现今制造领域出现了一系列颠覆性技术,如机器人技术、自动驾驶技术、虚拟现实技术、新材料技术、电池储能技术、基因检测技术、增材制造技术等。颠覆性的生产技术和革命性的制造方式,正深刻影响人类的产业发展和经济活动。中国要在新工业革命中站立潮头,就必须以先进制造业为支柱构建现代化经济体系。科技创新的加快推进,大数据、互联网、遥感探测等新技术与矿业交叉融合,数字化、智能化技术和装备研发应用,使矿业发展新动能日益强劲,为矿业转型升级,实现创新发展开辟了新领域。身处新形势,智能化是矿业发展的必由之路,是提高矿企核心竞争力、实现可持续发展的必然选择。 随着工业自动化的高速发展,计算机在对生产过程的控制起着越来越重要的作用,单片机作为微型机的一个分支以其独特的结构和优点,已经在工业生产和科学实验的各个部门得到了迅速的推广和应用。而由单片机控制的机器人是机构学、运动学、控制理论等学科发展水平的综合体现,是当前国内外研究的热点问题之一。 目前对于移动式机器人多采用轮式和履带式移动机构,履带式移动机器人以其强大的地形适应性而倍受青睐,其所受的摩擦力均匀分布在履带上,表现出更好的操控性,但是转弯时,履带的磨损、履带开模难度大等都成为其应用的瓶颈;轮式移动机器人克服了履带式的这些缺点,在满足一定地形适应性的前提下,可以充分发挥移动机器人移动灵活、控制简单等优点。一般来说,轮式移动机器人对地形的适应性大小与轮子的数量成正比,但随着轮子数量的增加,又带来了机器人体积庞大、重量重等缺点,同时在适应复杂地形和事故发生后地形改变时轮式和履带式机器人无法满足路况的要求。由此按照目前的状况来看,设计一种灵活的、行走平稳和对路况适应性强的机器人成为解决此类问题的关键,六足仿生机器人便是这种机器人的典型代表,而六足仿生机器人的步态研究对其的行走方式更是有重要意义。 从仿生学的角度,昆虫的生理构造及行为是比较容易模仿的,我们的机器人正是在模仿六足行走的昆虫,该机器人是一个仿生六足行走的机器人,通过对马达的精确控制,模拟六足动物的行走步态,实现行走、急跑、转穹等各种步态行为,并能在各种地面环境下进行步态的智能调整,自适应光滑地面、粗糙地面、沙石地面、湿泥地面等恶劣的路面环境。
5、运行环境(所需操作系统、硬件、软件等)
CINEMA 4D R19版本及以上